2 FlexiBowl® and 2 Cameras#
This section describes the configurations available when operating two FlexiBowl® devices and two cameras managed by a single FlexiVision One VisionController.
Configuration overview#
In a 2-FlexiBowl® + 2-camera configuration, the system comprises two independent feed and vision stations, both controlled by the same VisionController. Each station consists of:
1 FlexiBowl®
1 Camera with dedicated lens
1 Hopper (optional, if present)
The two stations communicate with the VisionController via a network switch.
Important
The Switch is a mandatory component in all multi-device configurations. Without it, it is not possible to connect multiple FlexiBowl® units and multiple cameras to the VisionController at the same time. For technical specifications and order codes, refer to the Switch section.
This configuration supports two operating variants, depending on the number of robots available in the system:
Variant A |
Variant B |
|
|---|---|---|
Robot |
1 |
2 |
FlexiBowl® |
2 |
2 |
Cameras |
2 |
2 |
Operating logic |
The robot reaches both stations |
Each robot is dedicated to a station |
Switch required |
Yes |
Yes |
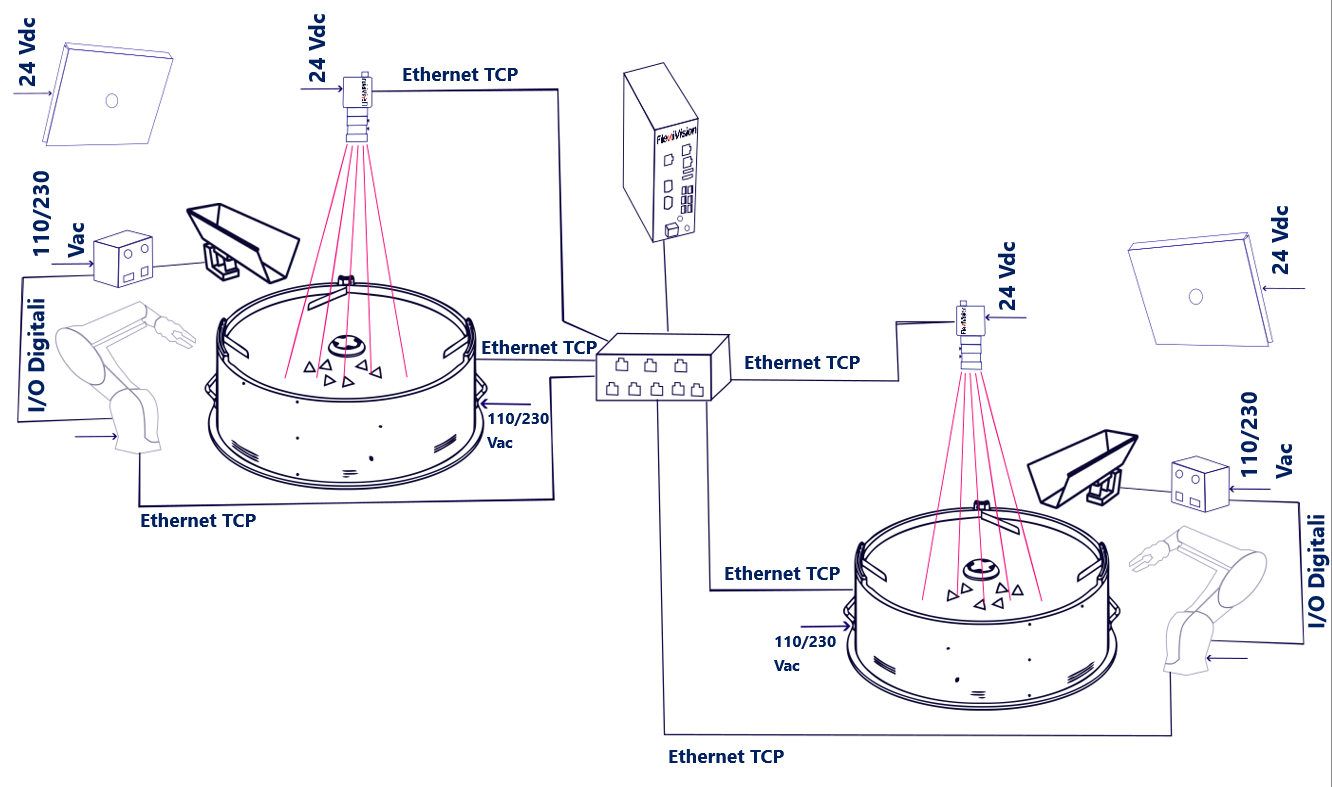
Variant A — 1 Robot, 2 FlexiBowl® devices#
In this variant, a single robot operates on both stations. The robot is positioned so that it can reach the picking area of each FlexiBowl®, alternating picking between the two stations based on the commands received.
Each station runs its own independent recipe. A Standard or Mix application can be configured on each station, with different component models within the same recipe.
Parameter |
Value |
|---|---|
FlexiBowl® |
2 |
Cameras |
2 |
Robot |
1 |
Switch required |
Yes |
Important
Basic recipe and recipe management
As with the single configuration, in a 2FB + 2CAM configuration, the process starts with the creation of a single basic recipe, which contains the hardware setup and camera calibration for the entire system. This basic recipe is then duplicated for each station: each duplicate constitutes the operating recipe for that station, within which the part models (up to 8 per station) are created.
Therefore, it is crucial that the pairing between the devices is configured correctly from the start:
Camera 1 → FlexiBowl® 1 (+ Hopper 1, if present)
Camera 2 → FlexiBowl® 2 (+ Hopper 2, if present)
An incorrect pairing during setup would affect all derived recipes, compromising the identification of parts and the correct operation of the entire system.
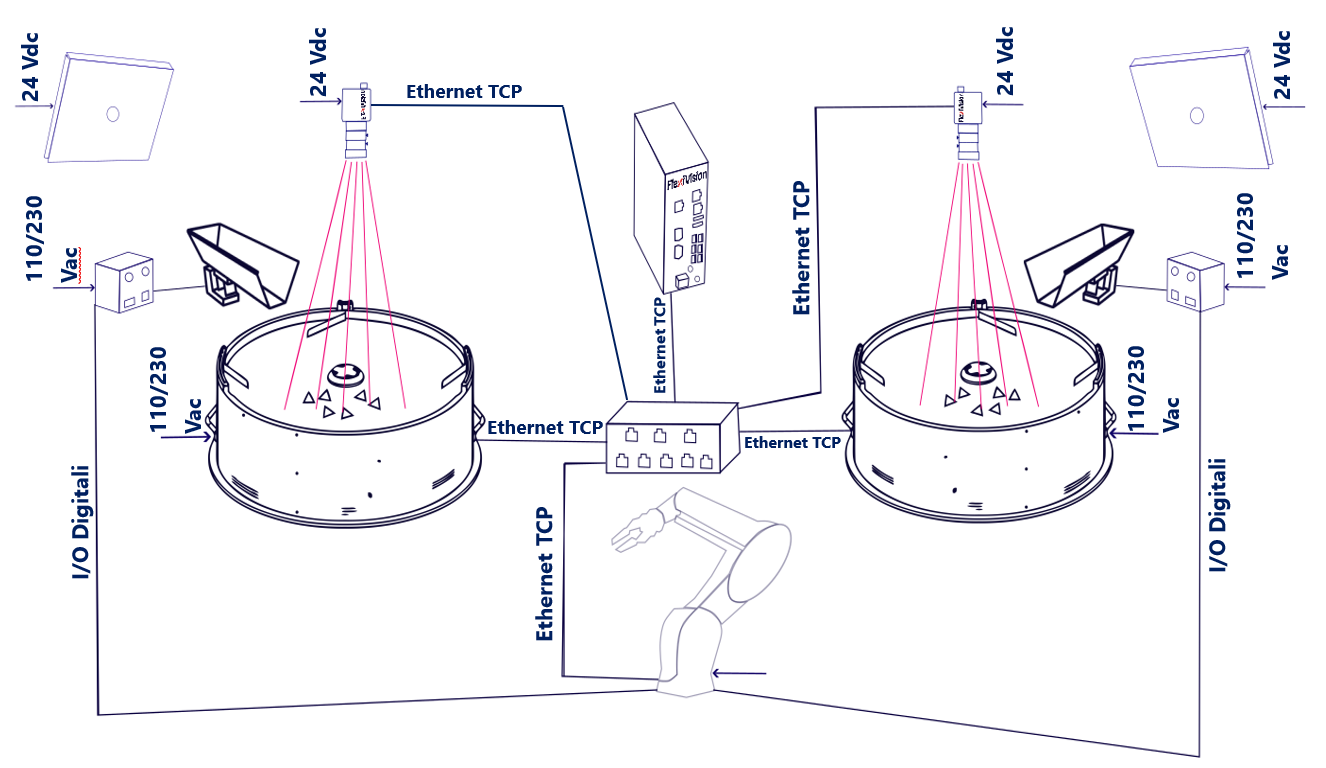
Variant B — 2 Robots, 2 FlexiBowl®#
In this variant, each robot is dedicated to a single station: Robot 1 performs picking on FlexiBowl® 1, Robot 2 performs picking FlexiBowl® 2. The two cells are independent and do not overlap.
In this variant as well, each station supports both Standard and Mix applications.
Parameter |
Value |
|---|---|
FlexiBowl® |
2 |
Cameras |
2 |
Robot |
2 |
Switch required |
Yes |
Tip
This variant guarantees maximum productivity, with the two cells operating in parallel and completely autonomously.
Important
Basic recipe and recipe management
As with the single configuration, in a 2FB + 2CAM configuration, the process starts with the creation of a single basic recipe, which contains the hardware setup and camera calibration for the entire system. This basic recipe is then duplicated for each station: each duplicate constitutes the operating recipe for that station, within which the part models (up to 8 per station) are created.
Therefore, it is crucial that the pairing between the devices is configured correctly from the start:
Camera 1 → FlexiBowl® 1 (+ Hopper 1, if present)
Camera 2 → FlexiBowl® 2 (+ Hopper 2, if present)
An incorrect pairing during setup would affect all derived recipes, compromising the identification of parts and the correct operation of the entire system.
Necessary components#
FlexiVision One basic kit#
The FlexiVision One basic kit (supplied with the system) already includes everything needed for the first station (camera, lens, cables, calibration grid). There is no need to purchase a second complete kit for the second station.
Additional Camera Kit#
For the second station, simply purchase the Additional Camera Kit, available in a specific version for each FlexiBowl® size. The kit includes:
1 Camera
1 specific lens for that FlexiBowl® size
1 Calibration grid
1 Camera power cable
2 Ethernet cables
Select the kit according to the size of the second FlexiBowl®:
FlexiBowl® size |
Additional Camera Kit Code |
Lens included |
|---|---|---|
FB 200 |
GM002002 |
CE000881 — FlexiVision One 35mm Optic |
FB 350 |
GM002003 |
CE000881 — FlexiVision One 35mm Optic |
FB 500 |
GM002004 |
CE000880 — FlexiVision One 25mm Optic |
FB 650 |
GM002005 |
CE000879 — FlexiVision One 16mm Optic |
FB 800 |
GM002006 |
CE000879 — FlexiVision One 16mm Optic |
FB 1200 |
GM002007 |
CE000878 — FlexiVision One 12mm Optic |
Note
If the two stations use different FlexiBowl® sizes, the Additional Camera Kit must be selected according to the size of the FlexiBowl® of the second station. The first station is already covered by the basic kit.
Switch#
The Switch is always required in multi-device configurations. For code, electrical and physical specifications, see the dedicated section:
→ Switch
Wiring#
The wiring diagram is identical for both variants: all field devices (FlexiBowl®, cameras, robots) connect to the Switch, and the Switch connects to the VisionController via a single Ethernet port. The difference between Variant A and Variant B only concerns the number of robots connected to the Switch.
Important
The Switch has 8 Ethernet ports. Check that the total number of devices to be connected does not exceed the available capacity, taking into account all FlexiBowl®, cameras and robots present.
Connection diagram#
Device |
Connection |
|---|---|
FlexiBowl® 1 |
Ethernet Port → Switch |
FlexiBowl® 2 |
Ethernet Port → Switch |
Camera 1 |
Ethernet Cable → Switch |
Camera 2 |
Ethernet Cable → Switch |
Robot 1 |
Ethernet Port → Switch |
Robot 2 (Variant B only) |
Ethernet Port → Switch |
Switch |
Ethernet Port → VisionController |
Tip
Make sure that each device is assigned a unique IP address in the same subnet. The TCP/IP ports used by the VisionController for the two stations are configurable: by default FB1 → 4001, FB2 → 4002. See Robot-Vision Communication Protocol section for details.
Switch ports engaged per variant#
Switch Port |
Variant A (1 Robot) |
Variant B (2 Robots) |
|---|---|---|
1 |
FlexiBowl® 1 |
FlexiBowl® 1 |
2 |
FlexiBowl® 2 |
FlexiBowl® 2 |
3 |
Camera 1 |
Camera 1 |
4 |
Camera 2 |
Camera 2 |
5 |
Robot 1 |
Robot 1 |
6 |
VisionController |
Robot 2 |
7 |
— |
VisionController |
8 |
— |
— |
Note
Wiring of individual components
The physical connection procedures of each component (FlexiBowl®, camera, hopper, robot) are fully described in the Wiring and Connections section. In a 2FB + 2CAM configuration, the same operations simply have to be performed twice - once for each station - with the only difference being that each device connects to the Switch rather than directly to the VisionController.
Important
Device pairing in software
FlexiVision One can manage all stations simultaneously, but it is essential that device pairing be configured correctly in the software. Make sure to pair:
Camera 1 → FlexiBowl® 1 (+ Hopper 1, if present)
Camera 2 → FlexiBowl® 2 (+ Hopper 2, if present)
An incorrect pairing would compromise the tracking of the parts and the proper operation of the entire system.
→ Initial System Configuration