Protocol Setup#
Auf der Seite Protocol Setup können Sie die Parameter konfigurieren, die den Kommunikationsfluss und den Datenaustausch zwischen dem Bildverarbeitungssystem FlexiVision One und dem Roboter regeln. Diese Parameter legen fest, wie viele Objekte gesendet werden, in welcher Reihenfolge sie angeordnet sind und wie das System Statistiken und Betriebszustände verwaltet.
Zugriff auf Protocol Setup#
Rufen Sie im Hauptmenü den Bereich für das Kommunikationsprotokoll auf
Wählen Sie Protocol Setup
Die Benutzeroberfläche mit den konfigurierbaren Parametern wird geöffnet
Konfigurierbare Parameter#
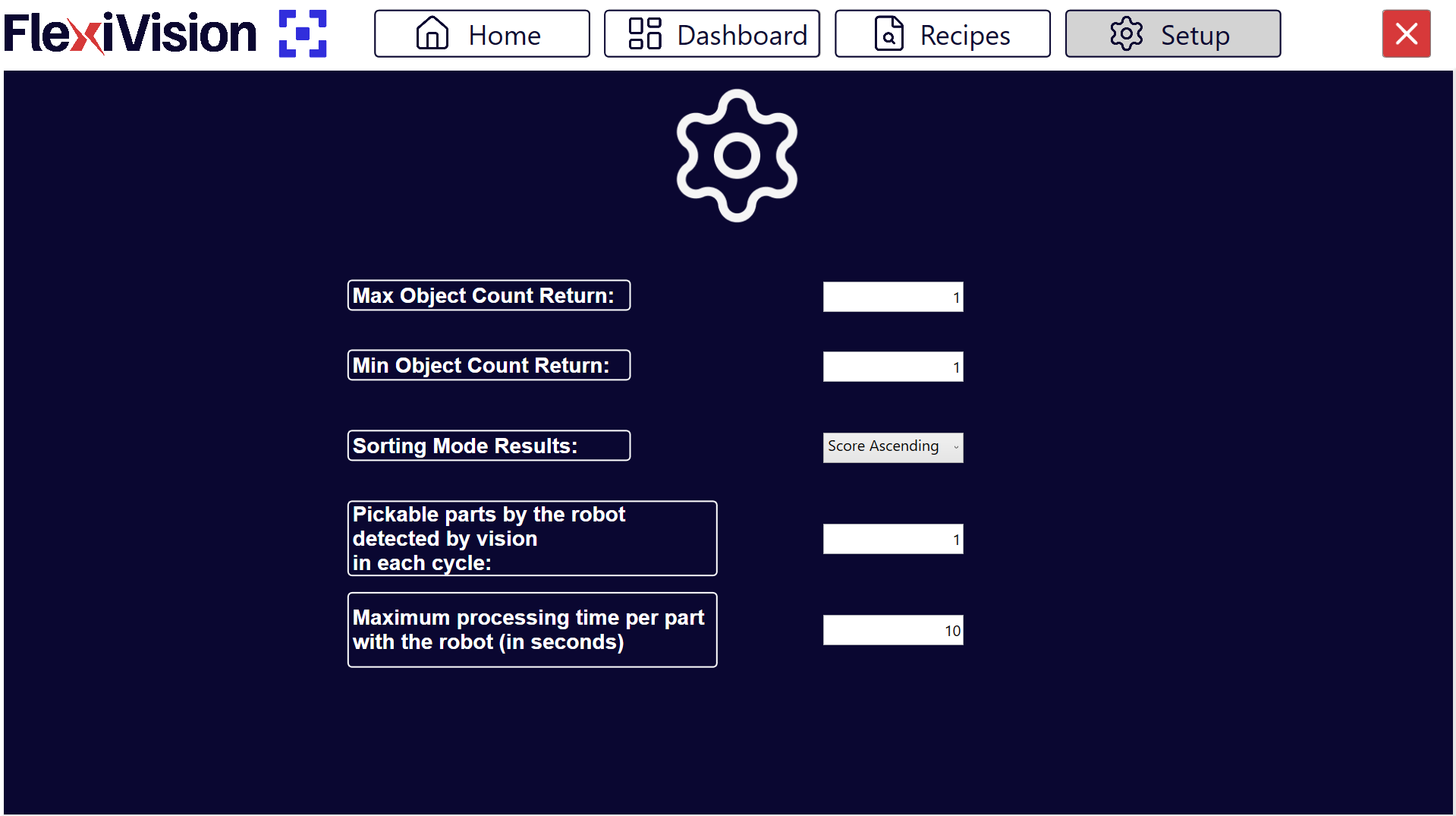
Parameter |
Beschreibung und Funktion |
|---|---|
Gibt die maximale Anzahl von Objekten (d. h. ihre Dreiergruppe von Koordinaten) an, die das Bildverarbeitungssystem in einem einzelnen Durchlauf an den Roboter zurücksenden kann. Wenn das Bildverarbeitungssystem mehr Objekte als diesen Grenzwert erkennt, werden maximal diese Anzahl an Objekten gesendet, die nach dem konfigurierten Sortierkriterium (Sorting Mode) ausgewählt werden. |
|
Gibt die Mindestanzahl an Objekten an, die in einem Durchlauf zurückgegeben werden müssen, damit das Ergebnis als gültig angesehen wird. Liegt die Zahl unter diesem Schwellenwert, wird der Durchlauf als ungültig betrachtet. |
|
Legt das Sortierkriterium fest, nach dem die Liste der vom Bildverarbeitungssystem zurückgegebenen Objekte sortiert wird. Dieser Parameter bestimmt die Entnahmereihenfolge und legt fest, welche Objekte in die Max Object Count Return einbezogen werden. Typische Option: nach absteigendem Score. |
|
Pickable parts by the robot detected by vision in each cycle |
Gibt die Anzahl der Greifvorgänge an, die der Roboter pro Lauf des Vision-Systems ausführt. Beispielsweise entspricht ein Doppelgreifvorgang dem Wert 2. Dies stellt nicht die Anzahl der vom Vision-System erkannten Objekte dar, sondern die Anzahl der Roboter-Greifvorgänge pro Zyklus. Parameter für die Berechnung der Statistiken. |
Maximum processing time per part with the robot (in seconds) |
Definiert die maximale Zeit, nach der das System die Verarbeitung/Übermittlung der Koordinaten für einen Durchlauf als abgeschlossen betrachtet und typischerweise vom Status RUN in den Status IDLE wechselt. Parameter für die Statistiken und Workflow-Management. Attention Es handelt sich nicht um ein Zeitlimit für einen Roboterfehler, sondern um einen Zeitbezugspunkt für die Zyklusberechnung und für Produktivitätskennzahlen. |
Detaillierte Konfiguration der Parameter#
Max Object Count Return#
Funktion: |
Begrenzt die maximale Anzahl von Koordinaten, die pro Bildverarbeitungszyklus an den Roboter gesendet werden. |
Typische Werte: |
Tip So wählen Sie den Wert aus:
Praktisches Beispiel:
|
Min Object Count Return#
Funktion: |
Begrenzt die Mindestanzahl an Koordinaten, die pro Bildverarbeitungszyklus an den Roboter gesendet werden. |
Typische Werte: |
|
Systemverhalten: |
|
Auswirkungen auf die Produktivität |
Min Count = 1 (weniger restriktiv):
Min Count = 3 (restriktiver):
|
Sorting Mode Results#
Sortiermodus |
Beschreibung und Verwendung |
|---|---|
By Score (Descending) |
Sortieren nach Punktzahl von der höchsten zur niedrigsten. Objekte mit einer besseren Übereinstimmung mit dem Modell werden zuerst gesendet. Am häufigsten verwendet und empfohlen: Gewährleistet stets die Entnahme der Teile mit der zuverlässigsten Erkennung. |
By Score (Ascending) |
Sortierung nach Punktzahl von der niedrigsten zur höchsten. Objekte mit einer schlechteren Übereinstimmung mit dem Modell werden zuerst gesendet. NICHT EMPFOHLEN: Garantiert NICHT immer eine zuverlässigere Erkennung bei der Teileauswahl. |
By X Coordinate (Ascending) |
Sortiert nach aufsteigender X-Koordinate. Nützlich, wenn der Roboter eine sequentielle Entnahme entlang einer Achse bevorzugt. |
By X Coordinate (Descending) |
Sortiert nach absteigender X-Koordinate. |
By Y Coordinate (Ascending) |
Sortiert nach aufsteigender Y-Koordinate. |
By Y Coordinate (Descending) |
Sortiert nach absteigender Y-Koordinate. |
X Alternating |
Das System wählt abwechselnd das erste und das letzte auf der X-Achse erkannte Teil aus. Da die beiden ausgewählten Teile weit voneinander entfernt sind, verringert sich das Risiko, dass eine vorherige Entnahme die Teile in der Nähe verschoben hat, was eine sicherere und zuverlässigere Entnahme gewährleistet |
Y Alternating |
Das System wechselt bei der Auswahl des Teils zwischen dem ersten und dem letzten auf der Y-Achse erfassten Teil. Gleiches Prinzip wie bei X Alternating: Der Abstand zwischen den beiden Aufnahmepunkten minimiert Störungen durch versehentliche Verschiebungen benachbarter Teile. |
Tip
Auswahl des optimalen Sorting Mode
In den meisten Fällen empfohlen: By Score (Descending)
Vorteile:
Maximale Zuverlässigkeit: Der Roboter nimmt immer die am besten erkannten Teile auf
Reduziert das Risiko einer falschen Entnahme
Unabhängig von der physischen Position
Note
Der Sortiermodus steht in Wechselwirkung mit Max Object Count. Die ersten 15 Objekte (gemäß dem Kriterium) werden gesendet.
Pickable parts by the robot#
Funktion
Statistischer Parameter, der angibt, wie viele Teile der Roboter pro Bildverarbeitungszyklus tatsächlich aufnimmt.
Typische Werte
1: Roboter mit Einzelgreifer, nimmt jeweils 1 Teil auf
2: Roboter mit Doppelgreifer oder Doppelsauger
>2: Roboter mit Mehrfachgreifer oder Sauger
Important
Dieser Wert bezieht sich auf die physisch aufgenommenen Teile, nicht auf die vom Bildverarbeitungssystem erkannten Objekte.
Erläuterndes Beispiel
Szenario: Doppelgreifer, die Bildverarbeitung erkennt 5 Objekte.
Wenn ich dem Roboter maximal 2 Objekte schicken möchte, stelle ich
Max Object Count = 2ein.Wenn ich möchte, dass der Roboter mindestens 2 Objekte auf einmal aufnimmt, stelle ich
Min Object Count = 2ein.In diesem Fall habe ich
Pickable Parts by the robot = 2eingestellt.Möchte ich hingegen auch die Aufnahme eines einzelnen Objekts zulassen, stelle ich
Max Object Count = 2,Min Object Count = 1undPickable Parts by the robot = 2ein.
Auswirkungen auf die Dashboard-Statistiken
Dieser Parameter ist entscheidend für die genaue Berechnung der Parts Per Minute (PPM).
Formel:
PPM = (Pickable parts x 60) / Tempo ciclo totale in secondiBei falscher Einstellung entspricht die angezeigte PPM nicht der Realität
Speichern der Konfiguration#
Warning
Speichern obligatorisch
Nach der Konfiguration der Parameter im Protocol Setup:
Überprüfen Sie, ob alle Werte korrekt eingestellt sind
Klicken Sie auf Recipes > Save Recipe
Die Parameter werden in der Systemkonfiguration gespeichert
Nächste Schritte#
Sobald das Protocol Setup abgeschlossen ist, ist das System vollständig für den Betrieb konfiguriert: