Definition von ROI und Toleranzen#
In diesem Abschnitt werden die Suchregion (Region Search) und die Erkennungstoleranzen für das erstellte Modell festgelegt. Diese Parameter bestimmen, wo und mit welcher Genauigkeit FlexiVision One während des Betriebs nach den Teilen sucht.
Was ist die Region Search? Die Region Search ist der Bereich, in dem FlexiVision One die zu entnehmenden Komponenten sucht und erkennt.
Verfahren#
Nachdem Sie auf der Trainingsseite auf Weiter” geklickt haben, öffnet sich automatisch die Seite „Define Robot Picking Limit Area Model“.
Schritt 1: Bereichsdefinition#
1 |
Bearbeiten Sie auf der Seite „Define Robot Picking Limit Area Model“ definierendas Feld, um den Suchbereich abzugrenzen |
2 |
Sobald die Größe des Suchbereichs korrekt eingestellt ist, klicken Sie auf |
3 |
Es öffnet sich die Seite „Locator Model 1 Cam 1“ |

Tip
Abmessungeneren Sie den Bereich entsprechend dem tatsächlichen Arbeitsraum des Roboters und vermeiden Sie Bereiche, die nicht erreichbar sind.
Tip
Bei Fragen während der Konfiguration klicken Sie bitte auf die Schaltfläche „INFO“ auf der aktuellen Seite.
Übersicht über die Benutzeroberfläche von „Locator Model“#
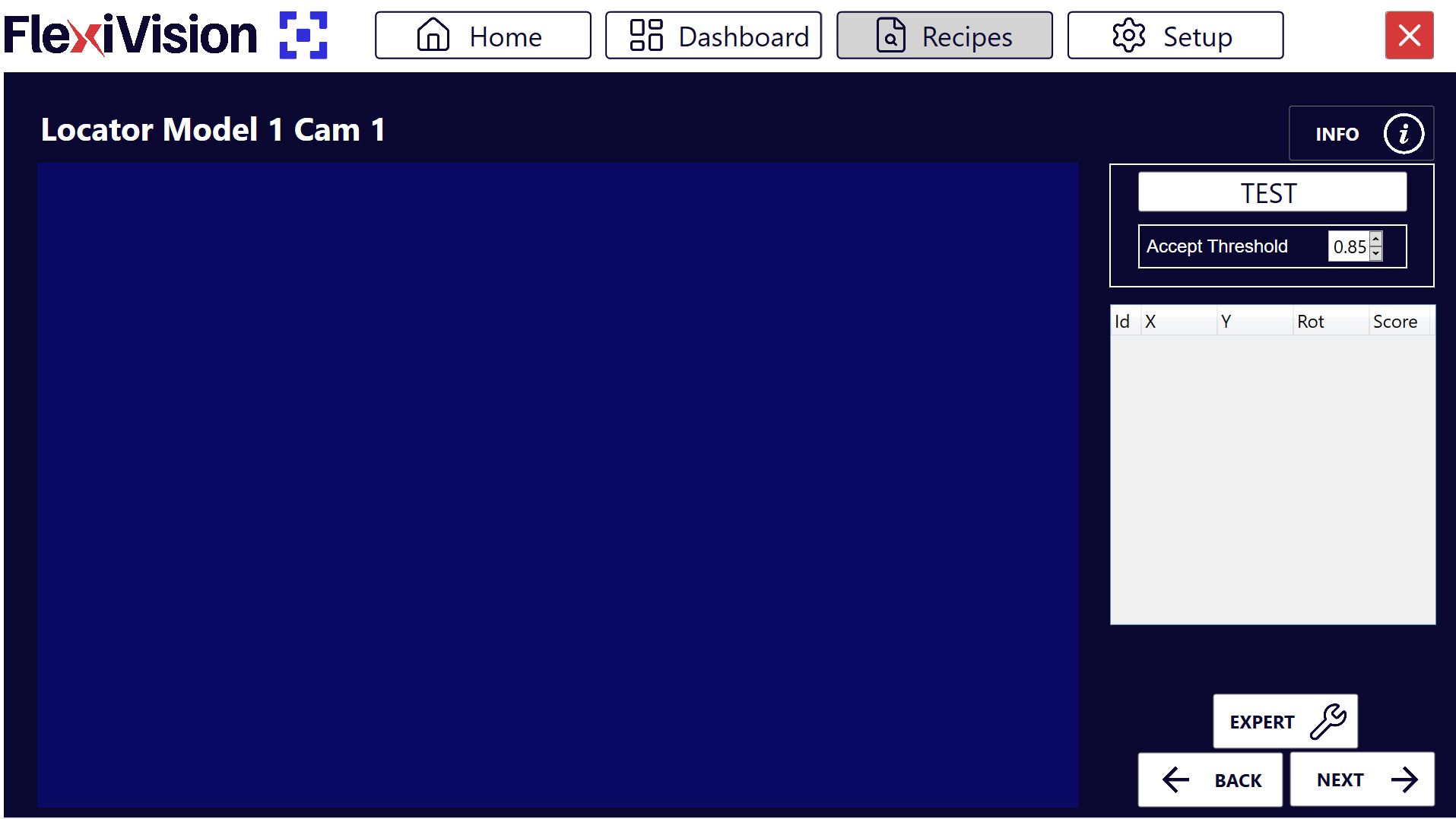
Parameter |
Beschreibung |
|---|---|
Test |
Führt einen Echtzeit-Erkennungstest mit den aktuellen Parametern durch |
Accept Threshold |
Mindestschwelle für die Wiedergabetreue (Score), die ein Teil haben muss, um akzeptiert zu werden |
Results Panel |
TFenster, das alle erkannten Teile mit Details (ID, Koordinaten, Score) anzeigt |
Video-Tutorial#
Erklärendes Video-Tutorial zu den folgenden Schritten 2 und 3:
Schritt 2: Vorbereitung der Szene#
4 |
Platzieren Sie weitere Teile zufällig im Sichtbereich um das Referenzteil herum, ohne dass sie mit diesem verwechselt werden. Warning Das für das Training verwendete Referenzteil darf nicht berührt werden! Und verlieren Sie sie nicht aus den Augen! |
Schritt 3: Testdurchführung und Accept Threshold#
5 |
Klicken Sie auf |
6 |
Beobachten Sie, wie viele Teile erkannt werden und mit welchen Werten |
7 |
Passen Sie den Accept Threshold an die Anforderungen der Anwendung an Note Was ist der Accept Threshold? Es handelt sich um den Mindestwert für die Übereinstimmung (Score), den eine erkannte Komponente im Vergleich zum Referenzmodell aufweisen muss, um akzeptiert zu werden.
|
 , um die Erkennung durchzuführen
, um die Erkennung durchzuführenTip
Empfohlener iterativer Ansatz:
Beginnen Sie mit Accept Threshold = 0.85
Führen Sie einen Test durch und beobachten Sie die Ergebnisse
Wenn zu viele Teile akzeptiert werden (einschließlich Fehlalarme) → Erhöhen Sie den Schwellenwert (z. B.: 0.90)
Wenn zu wenige Teile erkannt werden (gute Teile werden aussortiert) → Verringern Sie den Schwellenwert verringern (z. B. 0.80)
Wiederholen Sie den Vorgang, bis Sie den optimalen Wert für die Anwendung gefunden haben
Ziel: Den höchstmöglichen Wert finden, der alle guten Teile erkennt, aber die schlechtesten aussortiert.
Tip
Bei Fragen während der Konfiguration klicken Sie bitte auf die Schaltfläche „INFO“ auf der aktuellen Seite.
Interpretation der Ergebnisse#
Anzeige der erkannten Komponenten#
Im Bereich „Results“ werden alle erkannten Komponenten angezeigt, die den Accept Threshold erfüllen:
Feld |
Typ |
Beschreibung |
|---|---|---|
Id |
Ganzzahl |
Eindeutige fortlaufende Kennung (0, 1, 2, …) |
X |
Millimeter |
X-Koordinate des Teils (Bezug zum Ursprung des Kalibrierungsgitters) |
Y |
Millimeter |
Y-Koordinate des Teils (Bezug zum Ursprung des Kalibrierungsgitters) |
Drehung |
Grad |
Drehwinkel des Teils (0-360°) |
Score |
Prozentsatz |
Übereinstimmungsgrad mit dem Referenzmodell (0.00-1.00) Prioritätssystem |
Sistema di Priorità
FlexiVision One sortiert standardmäßig alle erkannten Teile automatisch nach absteigendem Score:
Id 0 → Teil mit dem höchsten Score (am ähnlichsten zum Referenzmodell)
Id 1 → Zweitbestes Teil
Id 2 → Drittbestes Teil
Und so weiter…
Beispiel für die Interpretation#
Angenommen, nach dem Test erscheinen folgende Ergebnisse:
Id |
X |
Y |
Drehung |
Score |
|---|---|---|---|---|
0 |
125.4 |
-45.2 |
15.3° |
0.92 |
1 |
-80.1 |
32.5 |
178.5° |
0.89 |
2 |
45.7 |
110.3 |
92.1° |
0.86 |
3 |
-150.2 |
-95.7 |
45.8° |
0.83 |
Auswertung:
Id 0: Die beste Übereinstimmung (92%) wird zuerst entnommen
Id 1: Gute Übereinstimmung (89%), zweite Option
Id 2: Befriedigende Übereinstimmung (86%), dritte Option
Id 3: Akzeptable Übereinstimmung (83%), vierte Option
Wenn der Wert für „Accept Threshold“ 0,85 wäre:
Id 0, 1, 2 würden akzeptiert
Id 3 würde verworfen werden (Score 0,83 < 0,85)
Abschluss#
Schritt 4: Reinigung und Fortsetzung#
8 |
Entfernen Sie alle Teile aus dem Bereich, außer dem Referenzteil und den beiden Objekten an dessen Seiten Danger Verschieben Sie das Referenzteil nicht! Achten Sie auch beim Bereinigen der Szene darauf, das Referenzteil nicht zu berühren oder zu verschieben. Seine Koordinaten werden in der letzten Phase noch für die Roboterkalibrierung benötigt. |
9 |
Klicken Sie auf |
See also
Fahren Sie mit der Konfiguration der Clearances fort, um die Freiräume zu definieren.