Robot-Pick-Kalibrierung#
Auf dieser Seite erfahren Sie, wie Sie die Koordinaten des Bildverarbeitungssystems mit denen des Roboters verknüpfen, um eine präzise Entnahme der Teile zu ermöglichen.
Was ist Robot Pick? Die Funktion Roboter-Pick berechnet den Versatz zwischen den von FlexiVision One erfassten Koordinaten und den tatsächlichen Koordinaten des Roboters, sodass der Roboter die Teile an der richtigen Position entnehmen kann.
Danger
Wichtige Roboterkoordinaten!
Für diesen Schritt sind die X-, Y- und Rz-Koordinaten, die während der physischen Vorbereitung des Setups (Schritt 1 im Abschnitt Clearances) gespeichert wurden, UNBEDINGT erforderlich.
Ohne diese Koordinaten kann die Kalibrierung nicht abgeschlossen werden. Sollten diese verloren gegangen sein oder vergessen worden sein, muss die gesamte physische Vorbereitung mit dem Roboter wiederholt werden.
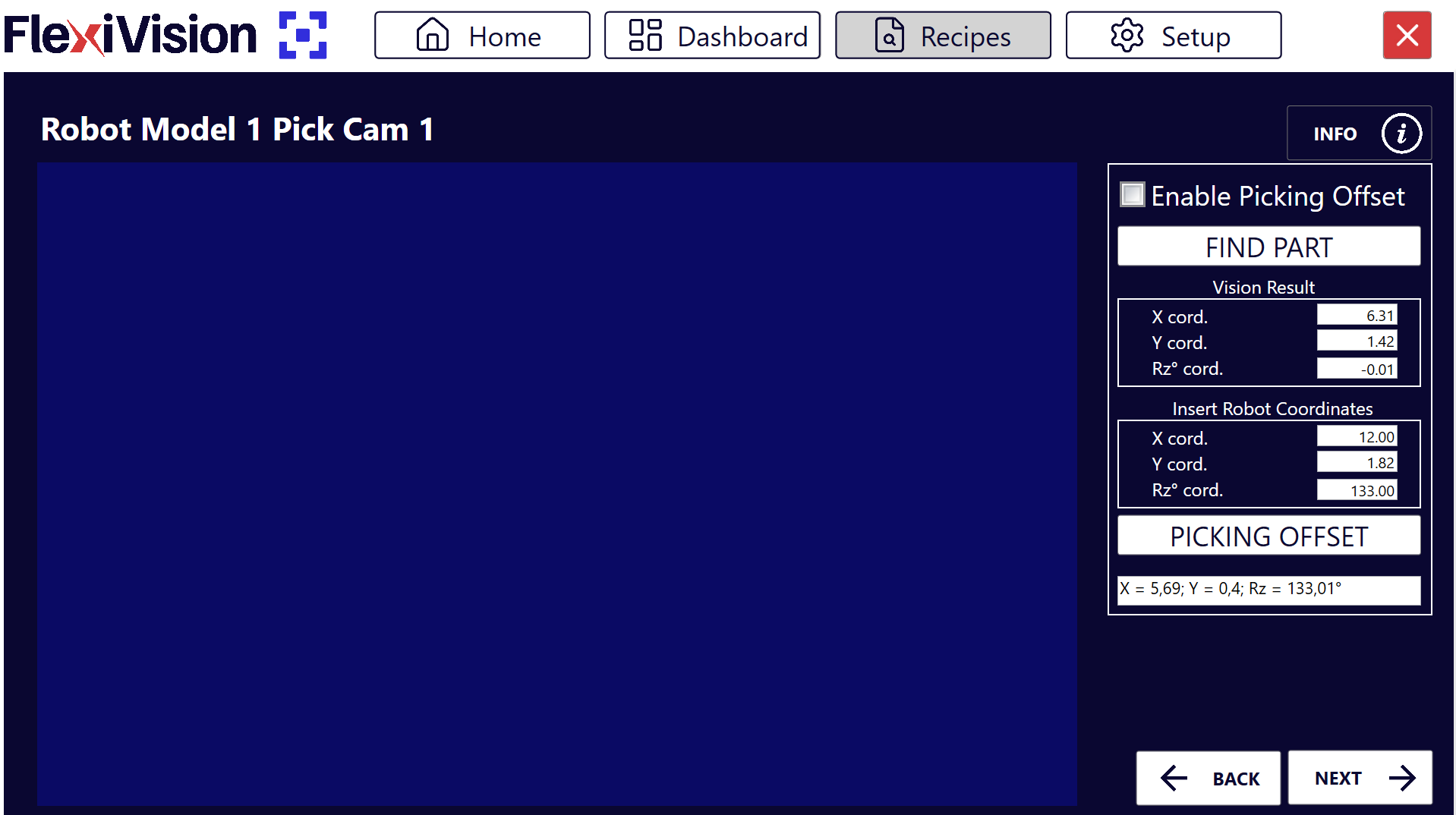
Übersicht über die Benutzeroberfläche Robot Pick#
Nachdem Sie auf der Seite Clearances auf Next geklickt haben, öffnet sich die Seite Robot Model Pick.
Abschnitt |
Parameter |
Funktion |
|---|---|---|
Enable |
Enable Robot Pick |
Aktiviert die Roboterkalibrierung |
Vision Result |
X cord |
Vom Bildverarbeitungssystem erfasste X-Koordinate |
Vision Result |
Y cord |
Vom Bildverarbeitungssystem erfasste Y-Koordinate |
Vision Result |
RZ cord |
Vom Bildverarbeitungssystem erfasste Z-Rotation |
Insert Robot Coordinate |
X cord |
X-Koordinate des Roboters (einzugeben) |
Insert Robot Coordinate |
Y cord |
Y-Koordinate des Roboters (einzugeben) |
Insert Robot Coordinate |
RZ cord |
Z-Drehung des Roboters (einzugeben) |
Funktion |
Beschreibung |
|---|---|
Find Object |
Erkennt das Teil und zeigt die Bildverarbeitungskoordinaten an |
Picking Offset |
Berechnet den Offset für die korrekte Aufnahme |
Schritt 1: Aktivierung und Erkennung des Bauteils#
1 |
Klicken Sie auf Enable Robot Pick |
2 |
Klicken Sie auf
Note Vision Result: Dies sind die Koordinaten, die FlexiVision One im Bild „sieht“. Sie sind noch nicht mit dem Koordinatensystem des Roboters verknüpft. |
 :
:Tip
Wenn Sie während der Konfiguration Zweifel haben, konsultieren Sie bitte die INFO-Taste auf der aktuellen Seite.
Schritt 2: Eingabe der Roboterkoordinaten und Berechnung des Offsets#
3 |
Geben Sie im Feld Insert Robot Coordinates die Koordinaten ein, die Sie bei der Erstellung des Modells gespeichert haben:
Danger Verwenden Sie die während der Modellkonfiguration gespeicherten Koordinaten. Ohne diese Koordinaten ist die Kalibrierung fehlerhaft! Die Koordinaten müssen mit höchster Genauigkeit eingegeben werden:
Fehler in dieser Phase führen zu völlig falschen Roboter-Offsets, was zu Entnahmeversuchen an falschen Positionen führt (mit Abweichungen von bis zu mehreren Zentimetern). Die Nichtbeachtung dieser beiden Punkte kann zu Kollisionen des Roboters führen, mit daraus resultierenden Schäden an FlexiBowl®, den Komponenten oder dem Roboter selbst. |
4 |
Klicken Sie auf
|

Wie funktioniert der Gripper Offset?
Das System vergleicht:
Bildverarbeitungskoordinaten: wo FlexiVision One den Ursprung des Teils „sieht“
Roboterkoordinaten: wo der Roboter das Teil tatsächlich gegriffen hat
Es berechnet die Differenz und speichert sie als Offset. Dieser Offset wird auf alle künftig erfassten Teile angewendet und stellt sicher, dass der Roboter immer an der richtigen Position aufnimmt.
Tip
Wenn Sie während der Konfiguration Zweifel haben, konsultieren Sie bitte die INFO-Taste auf der aktuellen Seite.
Schritt 3: Abschluss und Speichern#
5 |
Klicken Sie auf |
6 |
Klicken Sie auf Speichern abgeschlossen Die Speicherung umfasst:
|
 , um zur Rezeptseite zurückzukehren
, um zur Rezeptseite zurückzukehren 
 , um die gesamte Konfiguration zu speichern
, um die gesamte Konfiguration zu speichernMehrere Modelle - Weitere Modelle hinzufügen#
Schritt 4: Zusätzliche Modelle (optional)#
7 |
So erstellen Sie weitere Modelle im selben Rezept:
Tip Jedes Modell im Rezept kann unterschiedliche Konfigurationen (ROI, Freiraum, Versatz) aufweisen, wodurch Komponenten mit unterschiedlichen Eigenschaften in derselben Anwendung verwaltet werden können. |

See also
Bei Problemen in den soeben abgeschlossenen Schritten konsultieren Sie bitte Fehlerbehebung