Kalibrierung von Kamera und Roboter#
Die Kalibrierung ist der entscheidende Schritt, der die exakte geometrische Beziehung zwischen der realen Welt (Koordinaten in Millimetern) und dem von der Kamera aufgenommenen Bild (Pixel) herstellt. Ohne eine genaue Kalibrierung ist die Genauigkeit des Picking-Systems beeinträchtigt, was die gesamte Anwendung unzuverlässig macht.
Tip
Eine erneute Kalibrierung ist nicht erforderlich, wenn die Position des FlexiBowl® verändert wird.
Warum ist eine Kalibrierung notwendig?#
Die Kalibrierung ist notwendig, weil jede Kombination von Sensor und Objektiv spezifische Veränderungen im Bild hervorruft. Ihr Hauptziel ist es, diese Verzerrungen zu korrigieren.
Arten von optischen Verzerrungen#
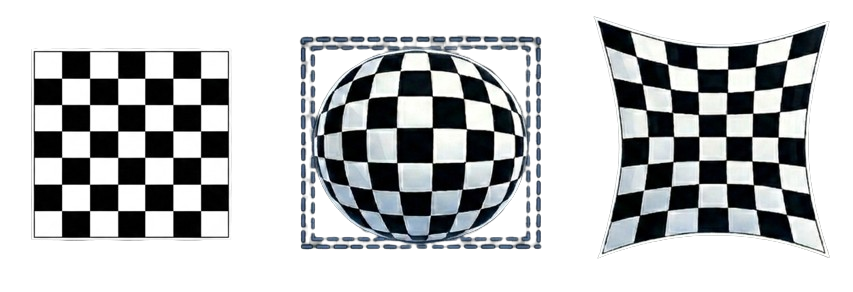
Beispiele für optische Verzerrungen: keine Verzerrung (links), tonnenförmige Verzerrung (Mitte), kissenförmige Verzerrung (rechts)#
Schritt 1: Das Kalibrierungsgitter#
Error
Stellen Sie sicher, dass Folgendes gegeben ist:
Backlight eingeschaltet (SETUP > FlexiBowl®-Setup > Config FlexiBowl® > Light ON aktiv)
Toplight aus
Das spezielle ARS-Kalibrierungsgitter muss auf dem FlexiBowl® gelegt werden:
Step |
Vorgang |
Bild |
|---|---|---|
0 |
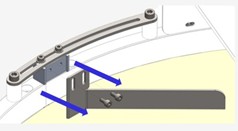
Falls vorhanden, entfernen Sie die am FlexiBowl® montierten Ablenkplatten. |
|
1 |
Lösen Sie die vier Schrauben des mittleren Flansches des FlexiBowl®. |
|
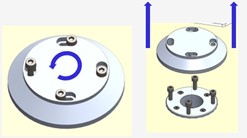
2 |
Drehen Sie den mittleren Flansch leicht gegen den Uhrzeigersinn und nehmen Sie ihn ab. |
|
3 |
Vorsichtig anheben und die Oberfläche entfernen. |
|
4 |
Bringen Sie bei Bedarf magnetische Abstandshalter an den vier Seiten des Gitters an. |
|
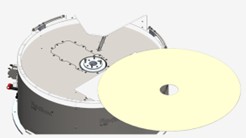
5 |
Positionieren Sie das ARS-Gitter auf dem FlexiBowl® und richten Sie dabei die Positionierungsstifte an den vorgegebenen Löchern am Rand des Backlights aus. |
|
Korrekte Positionierung des ARS-Kalibrierungsgitters auf der FlexiBowl®#
Attention
Das Kalibrierungsgitter muss auf derselben Höhe wie das in der Anwendung verwendete Objekt positioniert werden.
Aus diesem Grund wird es mit Abstandshaltern geliefert, die vor der Installation auf dem FlexiBowl® in die Stifte des Gitters eingesetzt werden müssen.
Die Abstandshalter dienen dazu, das Gitter auf die Höhe des Teils anzuheben und so eine genaue Kalibrierung zu gewährleisten.
Schritt 2: Grundlegende Einstellungen#
5 |
Rufen Sie den Abschnitt Camera SETUP im Menü SETUP auf |
6 |
Klicken Sie auf die Schaltfläche Config Camera der entsprechenden Kamera |
7 |
Klicken Sie auf der Seite Camera FLB auf EXPERT |
8 |
Versetzen Sie die Kamera in den Modus „Live Display“ Aktivieren Sie vor dem Einstellen der Blende den kontinuierlichen Anzeigemodus: 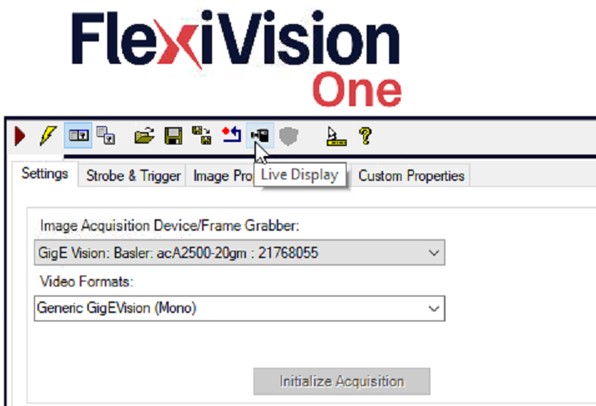
|
9 |
Stellen Sie die Blendenöffnung ein
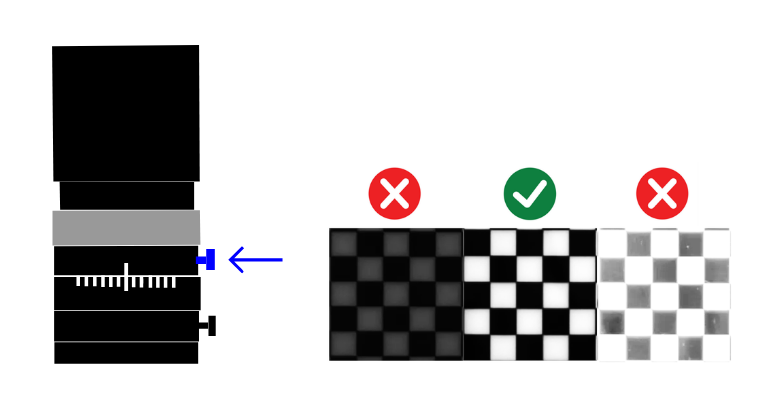
|
10 |
Stellen Sie den Fokus der Kamera manuell ein
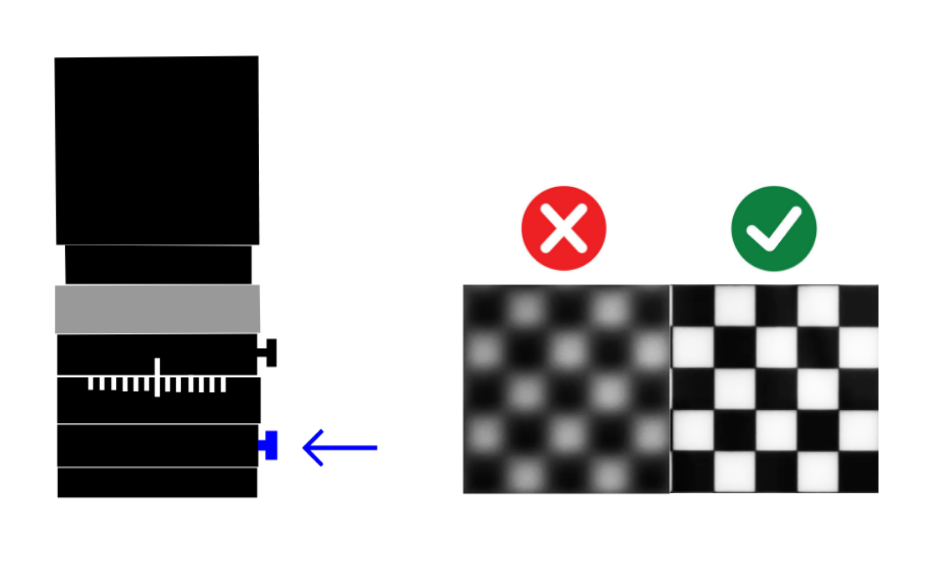
|
11 |
Klicken Sie auf Zurück |
Warning
Achtung zur Schärfentiefe
Die Fokussierung muss eine Schärfe über die gesamte Oberfläche des FlexiBowl® gewährleisten, nicht nur in der Mitte.
Wenn die Mitte scharf, die Ränder jedoch unscharf sind:
Überprüfen Sie, ob die Optik sauber ist
Überprüfen Sie, ob der Arbeitsabstand korrekt ist
Überprüfen Sie, ob die Kamera perfekt parallel zur Arbeitsfläche des FlexiBowl® ausgerichtet ist
Schließen Sie die Blende leicht, um die Schärfentiefe zu erhöhen
Wenn das Problem weiterhin besteht, muss möglicherweise die mechanische Montage der Kamera überprüft werden.
Error
Wenn beim mehrfachen Drücken der RUN-Taste auch nur einmal ein vollständig blauer Bildschirm erscheint, siehe Troubleshooting Kamera-Setup
12 |
Stellen Sie die Belichtung der Kamera ein
|
13 |
Klicken Sie auf NEXT |
 . Wiederholen Sie diesen Schritt, bis die richtige Belichtung für das Bild gefunden ist:
. Wiederholen Sie diesen Schritt, bis die richtige Belichtung für das Bild gefunden ist: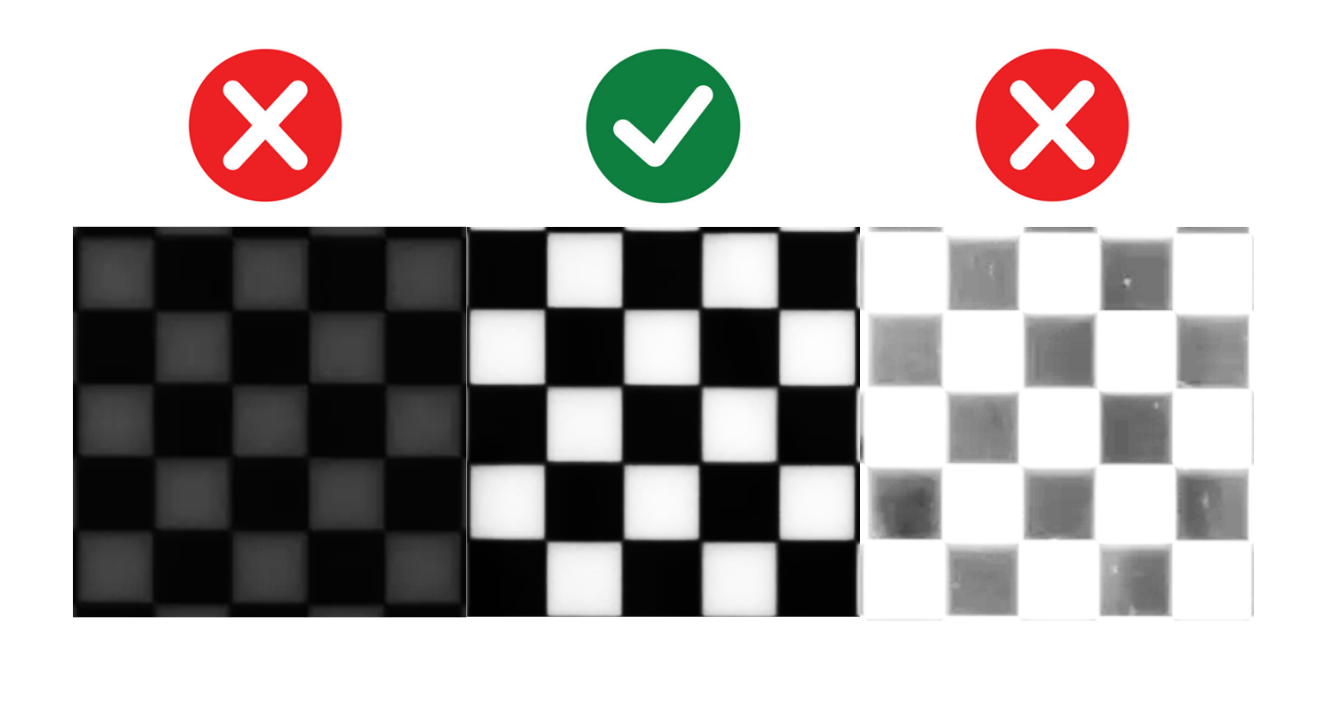
Beispiel für eine korrekte Belichtung: hoher Kontrast, gut definiertes Muster, keine überbelichteten Bereiche#
Tip
Optimierung der Belichtung
Je länger die Belichtungszeit, desto mehr Licht fällt in das Objektiv
Zu kurze Belichtungszeit: Dunkles Bild, Muster kaum sichtbar
Zu lange Belichtungszeit: Überbelichtetes Bild, Verlust von Details
Optimale Belichtungszeit: Maximaler Kontrast ohne Übersättigung
Tip
Wenn Sie während der Konfiguration Zweifel haben, konsultieren Sie bitte die INFO-Taste auf der aktuellen Seite.
Schritt 3: Kamerakalibrierung#
14 |
Vergewissern Sie sich, dass das Gitter zentriert, scharf und vollständig sichtbar ist, bevor Sie das Kalibrierungsbild aufnehmen. |
15 |
Klicken Sie auf „Grab Image“, um ein Foto des Kalibrierungsgitters aufzunehmen. Überprüfen Sie Folgendes visuell:
|
16 |
Stellen Sie die Werte „Tile Size X“ und „Tile Size Y“ für alle Modelle von FlexiBowl® 500 bis 1200 auf 10 ein. |
17 |
Klicken Sie auf „Calibrate“, um die Kalibrierung durchzuführen |
18 |
Bewertung der Kalibrierungsqualität Der Parameter „Result Calibration“ gibt einen Wert zurück: 🟢 Excellent (Grün): Hervorragende Kalibrierung, optimale Genauigkeit. 🟠 Acceptable (Orange): Akzeptable Kalibrierung, gute, aber nicht optimale Genauigkeit. 🔴 Bad (Rot): Schlechte Kalibrierung, unzureichende Genauigkeit. Muss unbedingt wiederholt werden. Important Akzeptieren Sie nur ausgezeichnete Kalibrierungen 🟢; andere Ergebnisse beeinträchtigen den Betrieb der gesamten Anwendung. |
Note
Akzeptanzkriterium
Ein zufriedenstellendes Ergebnis umfasst die Einstellung der Blende, die Fokussierung und die für die Anwendung optimale Belichtungseinstellung.
Warning
Fehler während der Berechnung
Wenn die Kalibrierungsberechnung fehlschlägt:
Mögliche Ursachen:
Muster nicht erkannt (Bild zu dunkel oder überbelichtet)
Rasterquadrate teilweise verdeckt
Übermäßige Verzerrung (Kamera zu nah oder zu weit weg)
Falsche Tile Size eingegeben
Lösung:
Prüfen und verbessern Sie die Qualität des aufgenommenen Bildes
Stellen Sie sicher, dass das gesamte Raster sichtbar und gut ausgeleuchtet ist
Prüfen Sie den Wert für die Tile Size
Wiederholen Sie die Bildaufnahme (Grab Image) und versuchen Sie es erneut
Tip
Wenn Sie während der Konfiguration Zweifel haben, konsultieren Sie bitte die INFO-Taste auf der aktuellen Seite.
Wann muss die Kalibrierung wiederholt werden#
Kalibrieren Sie in folgenden Fällen neu: |
Bei der ersten Einrichtung des Systems (obligatorisch). Nach einer Änderung der Kameraposition. Nach einer Verschiebung des Roboters. Wenn systematische Fehler beim Greifen auftreten. |
Eine Neukalibrierung ist in folgenden Fällen nicht erforderlich: |
Bei einem Wechsel des Teiltyps unter Beibehaltung des FlexiBowl® und der Kamera. Bei einer Änderung des Fokus oder der Blende des Objektivs. Wenn das Software-Rezept geändert wird. Wenn Erkennungsparameter angepasst werden. Wenn die Roboterprogramme aktualisiert werden. |
Roboter-Kalibrierung#
Schritt 4: Laser-Montage#
19 |
Sobald eine Kalibrierung von ausgezeichneter Qualität erreicht wurde, klicken Sie auf Es erscheint ein Fenster, das eine Roboter-Kalibrierung vor dem Fortfahren anfordert. Klicken Sie NICHT auf „Ja“ und folgen Sie den nächsten Schritten |
20 |
Montieren Sie das Laser Tool mit seinem individuellen Halter Important Die Halterung zum Anbringen des Laser-Tools anstelle des Robotergreifers wird NICHT mitgeliefert, da sie für jeden Roboter variiert und angepasst werden muss. 
|
21 |
Positionieren Sie den Spacer Bracket (A) unter dem Laser 
|
22 |
Senken Sie den Laser auf die Höhe des Spacers (A) ab, sodass der Laser genau 3 cm über dem Kalibrierungsgitter liegt 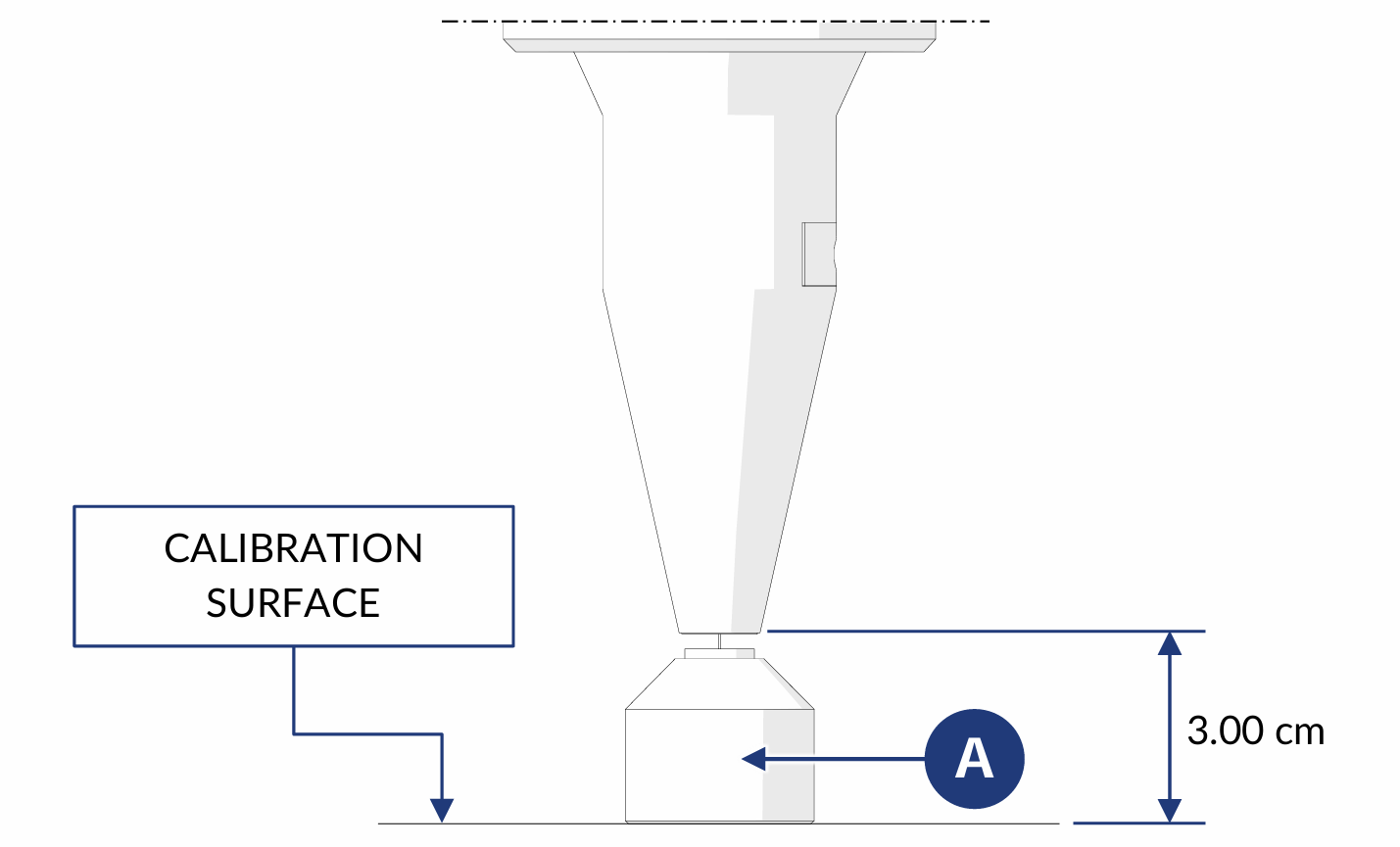
|
23 |
Entfernen Sie den Spacer Bracket 
|
24 |
Schalten Sie den Laser ein 
|
Tip
Wenn Sie während der Konfiguration Zweifel haben, konsultieren Sie bitte die INFO-Taste auf der aktuellen Seite.
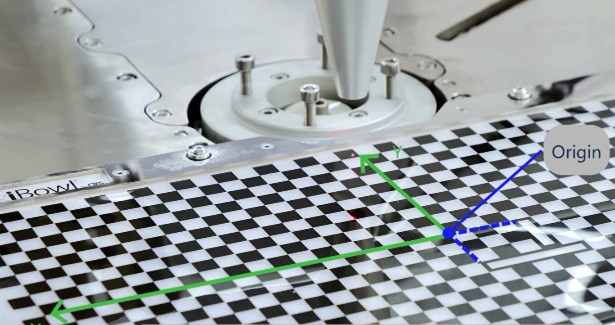
Schritt 5: Zeichnen einer 3-Punkt-Ebene#
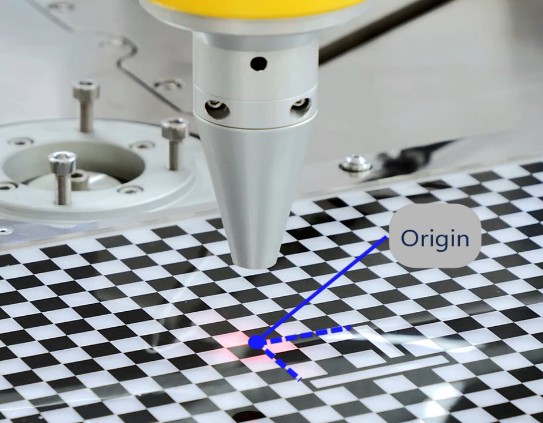
25 |
Führen Sie den Laser zum Ursprungspunkt |
|
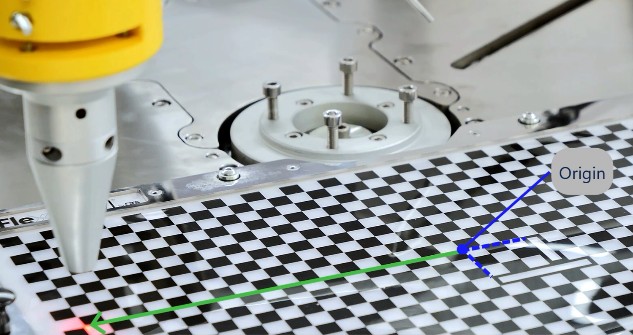
26 |
Führen Sie den Laser zum Endpunkt der X-Achse |
|
27 |
Führen Sie den Laser zum Endpunkt der Y-Achse |
|
Tip
Wenn Sie während der Konfiguration Zweifel haben, konsultieren Sie bitte die INFO-Taste auf der aktuellen Seite.
Schritt 6: Überprüfung der Roboterbahn#
28 |
Führen Sie den Laser zurück zum Ursprungspunkt |
29 |
Bewegen Sie den Roboter über seine Teach Pendant entlang der X- und Y-Achsen. |
30 |
Überprüfen Sie, ob die korrekte Trajektorie eingehalten wird: Der Roboter muss sich ausschließlich entlang der X- und Y-Achsen bewegen und dabei korrekt den Linien des Gitters folgen |
31 |
Klicken Sie auf „YES“ 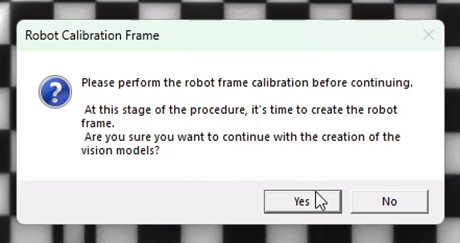
|
Tip
Wenn Sie während der Konfiguration Zweifel haben, konsultieren Sie bitte die INFO-Taste auf der aktuellen Seite.
Schritt 7: Speichern des Basisrezepts#
32 |
Klicken Sie auf |
33 |
Vergewissern Sie sich, dass Sie das Rezept mit allen Einstellungen und der Kalibrierung im Menü links ausgewählt haben, und klicken Sie auf |
34 |
Dadurch werden alle bisher durchgeführten Schritte separat gespeichert, sodass Sie eine Grundlage für alle zukünftigen Rezepte haben, die die verschiedenen Modelle für das kalibrierte System enthalten |
35 |
Um mit der Erstellung der Modelle fortzufahren, duplizieren Sie das Basisrezept, benennen Sie es nach Belieben um und klicken Sie auf |


 : Es wird eine Seite mit der Liste aller verfügbaren Modelle geöffnet
: Es wird eine Seite mit der Liste aller verfügbaren Modelle geöffnetHäufige Probleme bei der Kalibrierung#
Muster nicht erkannt#
Warning
Fehler: „Unable to detect calibration pattern“
Ursache: Die Software kann das Gittermuster nicht erkennen.
Lösungen:
Erhöhen Sie den Kontrast (passen Sie die Belichtung oder Beleuchtung an)
Stellen Sie sicher, dass das gesamte Gitter im Bild sichtbar ist
Verbessern Sie die Schärfe
Reinigen Sie die Oberfläche des Gitters (Staub oder Fingerabdrücke können stören)
Kalibrierung immer „Bad“ oder „Acceptable“#
Warning
Unzureichende Kalibrierungsqualität
Wenn die Kalibrierung trotz Anpassungen unter „Excellent“ bleibt:
Überprüfen Sie den Arbeitsabstand zwischen Kamera und FlexiBowl® (er muss dem berechneten Wert entsprechen)
Stellen Sie sicher, dass die Kamera parallel zur Ebene des FlexiBowl® ausgerichtet ist (sie muss perfekt horizontal sein)
Stellen Sie sicher, dass die Kamera stabil ist (keine Vibrationen während der Aufnahme)
Überprüfen Sie, ob das Objektiv vollständig festgeschraubt ist
Wenn das Problem weiterhin besteht, liegt möglicherweise ein mechanisches Problem bei der Montage vor. Siehe Mechanische Installation zur Überprüfung.
Nächste Schritte#
Sobald die Kalibrierung der Kamera und des Roboters abgeschlossen ist, fahren Sie mit fort: