Die Clearances#
Auf dieser Seite erfahren Sie, wie Sie Clearances konfigurieren, um sicherzustellen, dass kritische Bereiche frei von Hindernissen sind.
Was ist ein Clearance?
Ein Clearance in FlexiVision One ist ein Werkzeug, das einen bestimmten Bildbereich überwacht, um sicherzustellen, dass dieser frei ist. Es wird beispielsweise verwendet, um zu überprüfen, ob der für den Greifer zum Ergreifen des Bauteils erforderliche Raum nicht von anderen Objekten belegt ist.
Note
Funktionsprinzip.
Das Clearance analysiert die Graustufenveränderungen in einem definierten Bereich:
🟢 Grün → Freier Bereich (OK für die Aufnahme)
🔴 Rot → Belegter Bereich (Vorhandensein von Hindernissen)
Attention
Die Verwendung der Clearances variiert je nach dem Teil, für das das Modell erstellt werden soll. Diese Beurteilung ist Aufgabe der Person, die für die Erstellung der Anwendung zuständig ist.
Schritt 1: Physikalische Einrichtung#
Danger
Achtung! Wir zeigen Ihnen das Verfahren mit dem Greifer-Tool, das unbedingt die Konfiguration von Clearances für die Modelle erfordert. Andere Werkzeuge für den Roboter benötigen möglicherweise keine Clearances, um ihren Platzbedarf zu simulieren.
Tip
Bei Fragen während der Konfiguration klicken Sie bitte auf die Schaltfläche „INFO“ auf der aktuellen Seite.
Schritt 2: Aufruf der Seite „Clearance“#
6 |
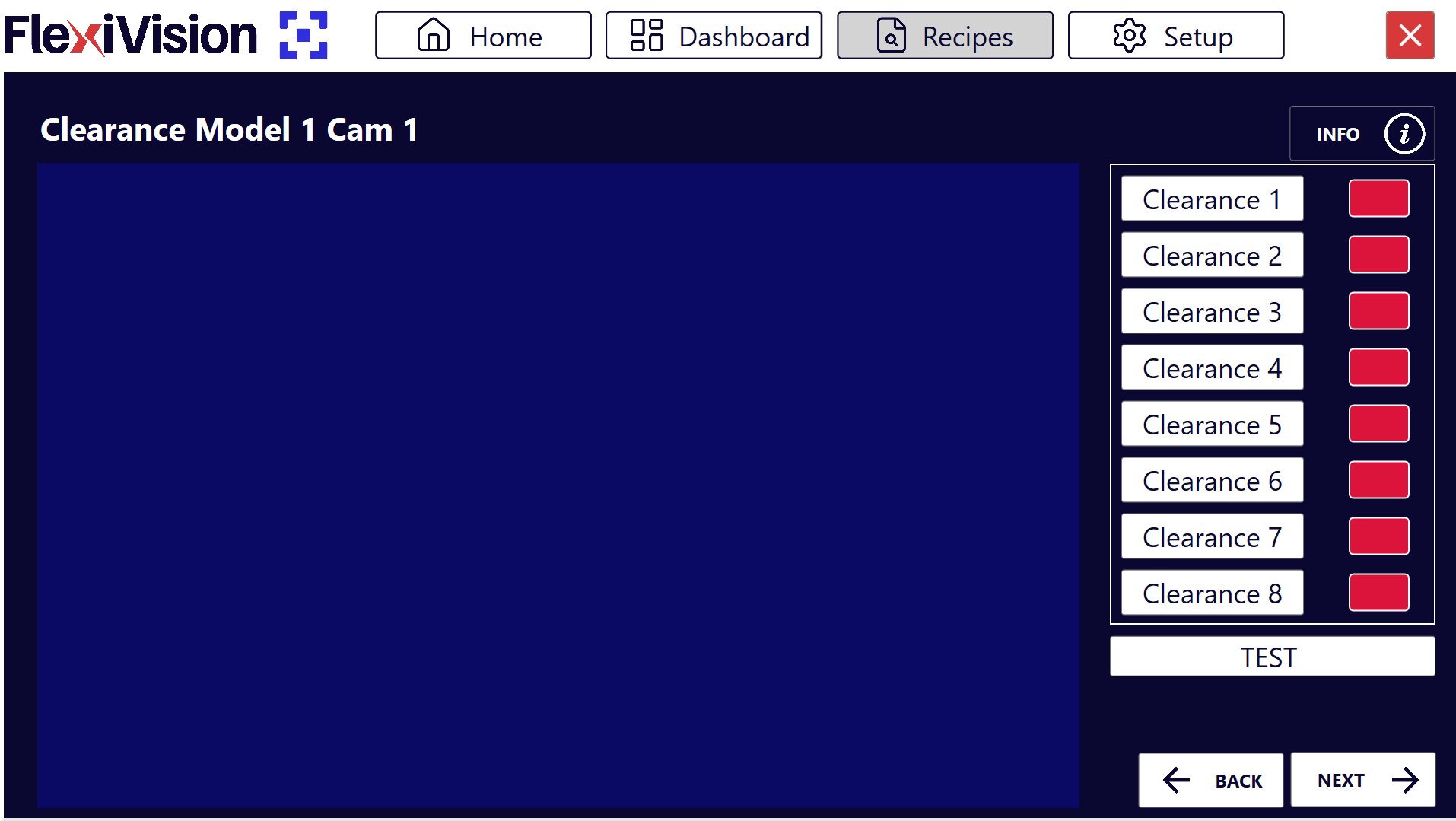
Auf der Seite „Locator Model“ öffnet sich nach dem Klicken auf „Next“ die Liste der verfügbaren Clearances (bis zu 8 pro Modell). Seite „Clearances“
|
||||||||||||
7 |
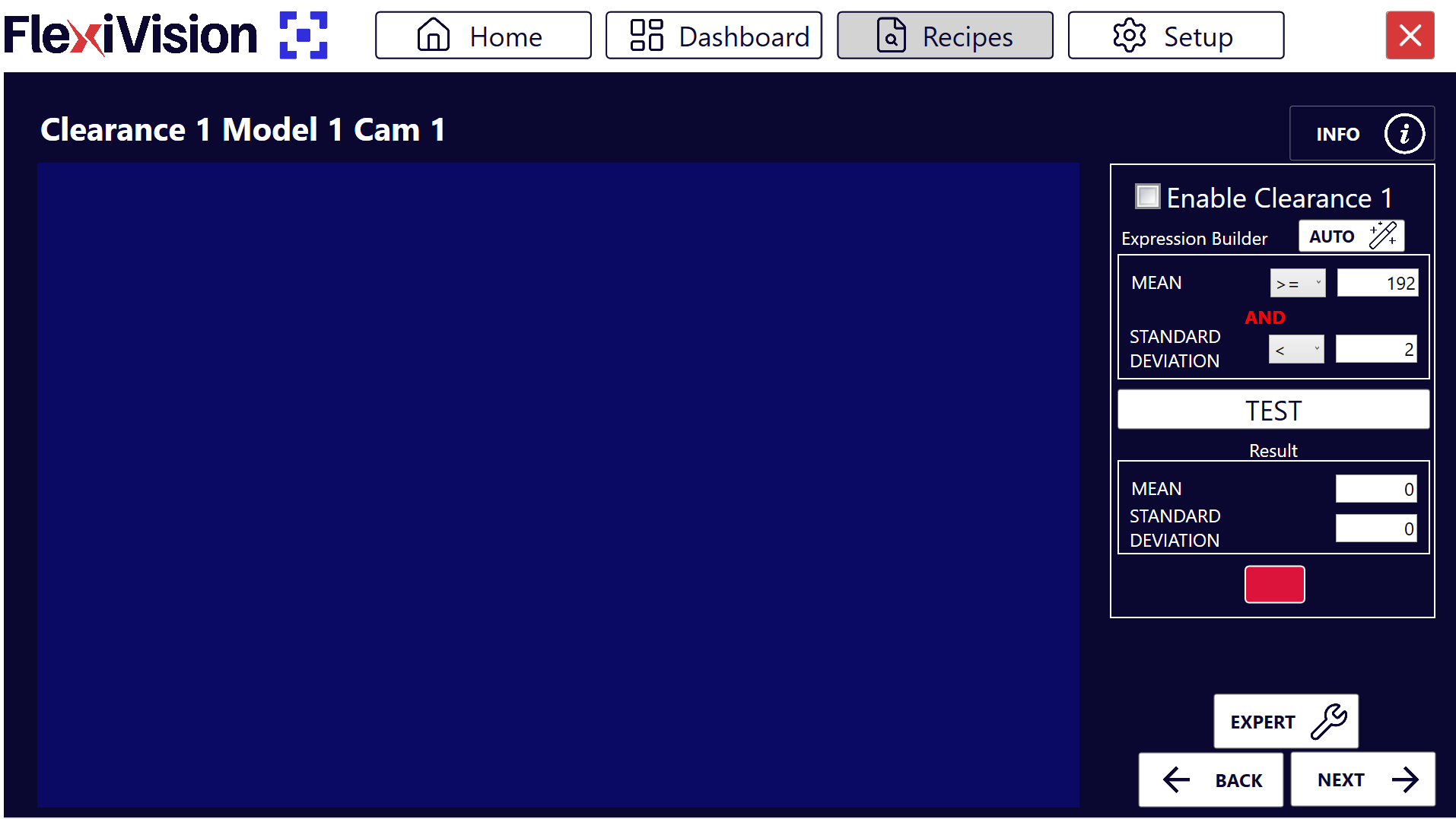
Klicken Sie auf „Clearance 1“, um die Seite zur Konfiguration des ersten Freiraums „Clearance 1“ zu öffnen Seite Clearance 1
|
Schritt 3: Aktivierung und Positionierung des Bereichs#
8 |
Klicken Sie auf „Enable Clearance“, um den Freiraum zu aktivieren |
9 |
Verschieben Sie den Clearance-Rahmen in den Bereich, der frei bleiben muss
Important Beachten Sie immer diese beiden wichtigen Aspekte:
Die Nichtbeachtung dieser beiden Punkte kann zu Kollisionen des Roboters führen, was Schäden am FlexiBowl®, an Komponenten oder am Roboter selbst zur Folge haben kann. |
Tip
Bei Fragen während der Konfiguration klicken Sie bitte auf die Schaltfläche „INFO“ auf der aktuellen Seite.
Schritt 4: Automatische Konfiguration#
10 |
Klicken Sie auf |
11 |
Klicken Sie auf |
12 |
Prüfen Sie, ob das Kästchen grün wird |
13 |
Klicken Sie auf |
 im Expression Builder
im Expression Builder

Warning
Was ist zu tun, wenn der Test fehlschlägt (rotes Kästchen)?
Wenn das Kästchen nach AUTO rot wird:
Mögliche Ursachen:
Es befindet sich tatsächlich etwas im Bereich (Teil, Schatten, Verschmutzung)
Die Beleuchtung hat sich zwischen der AUTO- und der TEST-Konfiguration verändert
Der ausgewählte Bereich umfasst Ränder des FlexiBowl® oder Artefakte
Lösungen:
Überprüfen Sie visuell, ob der Bereich vollständig frei ist
Wiederholen Sie AUTO unter stabilen Lichtverhältnissen
Wiederholen Sie TEST zur Überprüfung
Tip
Sollten Sie während der Konfiguration Zweifel haben, konsultieren Sie bitte die INFO-Taste auf der aktuellen Seite.
Mehrere Clearances – Wann sie zu verwenden sind#
Erstellen Sie mehrere Clearances, wenn:
Das Roboterwerkzeug eine Greifzange ist: Für jeden der beiden Bereiche, die die Greifzange an den Seiten des Referenzbauteils einnimmt, ist ein Clearance erforderlich
Es mehrere kritische Punkte zu überwachen gibt
Der Greifbereich besondere Geometrien aufweist
Schritt 2-3: Wiederholung#
Wählen Sie eine neue Clearance aus der Clearance-Liste aus, z. B. „Clearance 2“, und wiederholen Sie die Schritte 2–3. Wiederholen Sie den Vorgang für jede erforderliche Clearance (bis zu 8 pro Modell).
Schritt 4: Gesamttest#
Klicken Sie auf der Seite mit der Liste aller Clearances auf „TEST“, um alle Clearances gleichzeitig anzuzeigen
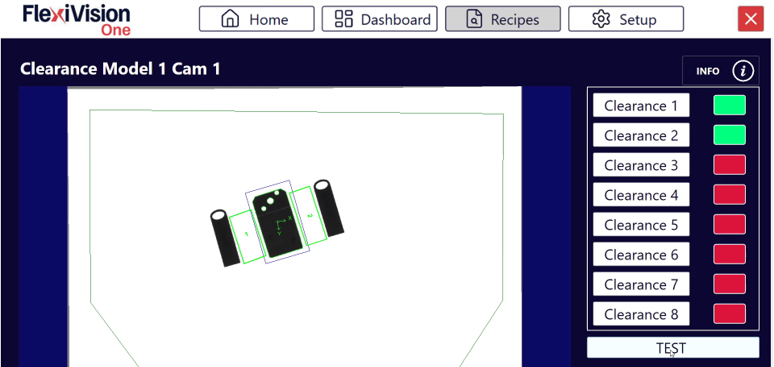 #
#
Interpretation der Status#
Status der Clearances#
Farbe |
Status |
Bedeutung |
Bild |
|---|---|---|---|
🟢 Grün |
OK |
Freier Bereich, Aufnahme möglich |
|
🔴 Rot |
Triggered |
Bereich belegt, Aufnahme nicht möglich |
|
Was bedeutet „Triggered“?#
Eine Freigabe wird rot (triggered), wenn sie in ihrem Inneren Folgendes erkennt:
Vorhandensein anderer Komponenten
Erhebliche Schatten oder Spiegelungen
Jedes Element, das den Bereich belegt
Schritt 5: Abschluss#
14 |
Nachdem Sie alle erforderlichen Clearances konfiguriert haben, klicken Sie auf |
15 |
Die Seite Robot Model Pick Cam wird geöffnet |
See also
Führen Sie die Roboter-Pick-Kalibrierung durch, um die Konfiguration abzuschließen.