Roboter Setup#
In diesem Abschnitt wird das Verfahren zur Konfiguration der TCP/IP-Kommunikation zwischen dem FlexiVision One-System und dem Industrieroboter beschrieben. Um den Austausch von Koordinaten und Befehlen zwischen den beiden Systemen zu ermöglichen, ist eine gute Kommunikation unerlässlich.
Note
Voraussetzungen
Stellen Sie vor dem Fortfahren Folgendes sicher:
Der Roboter ist eingeschaltet und betriebsbereit
Das Ethernet-Kabel zwischen VisionController und Roboter ist angeschlossen
Der Roboter ist so konfiguriert, dass er TCP/IP-Verbindungen akzeptiert (siehe Roboterhandbuch)
Der im Robotercode konfigurierte Kommunikationsport ist bekannt
Zugriff auf die Roboterkonfiguration#
1 |
Klicken Sie auf der Hauptseite der Software auf |
2 |
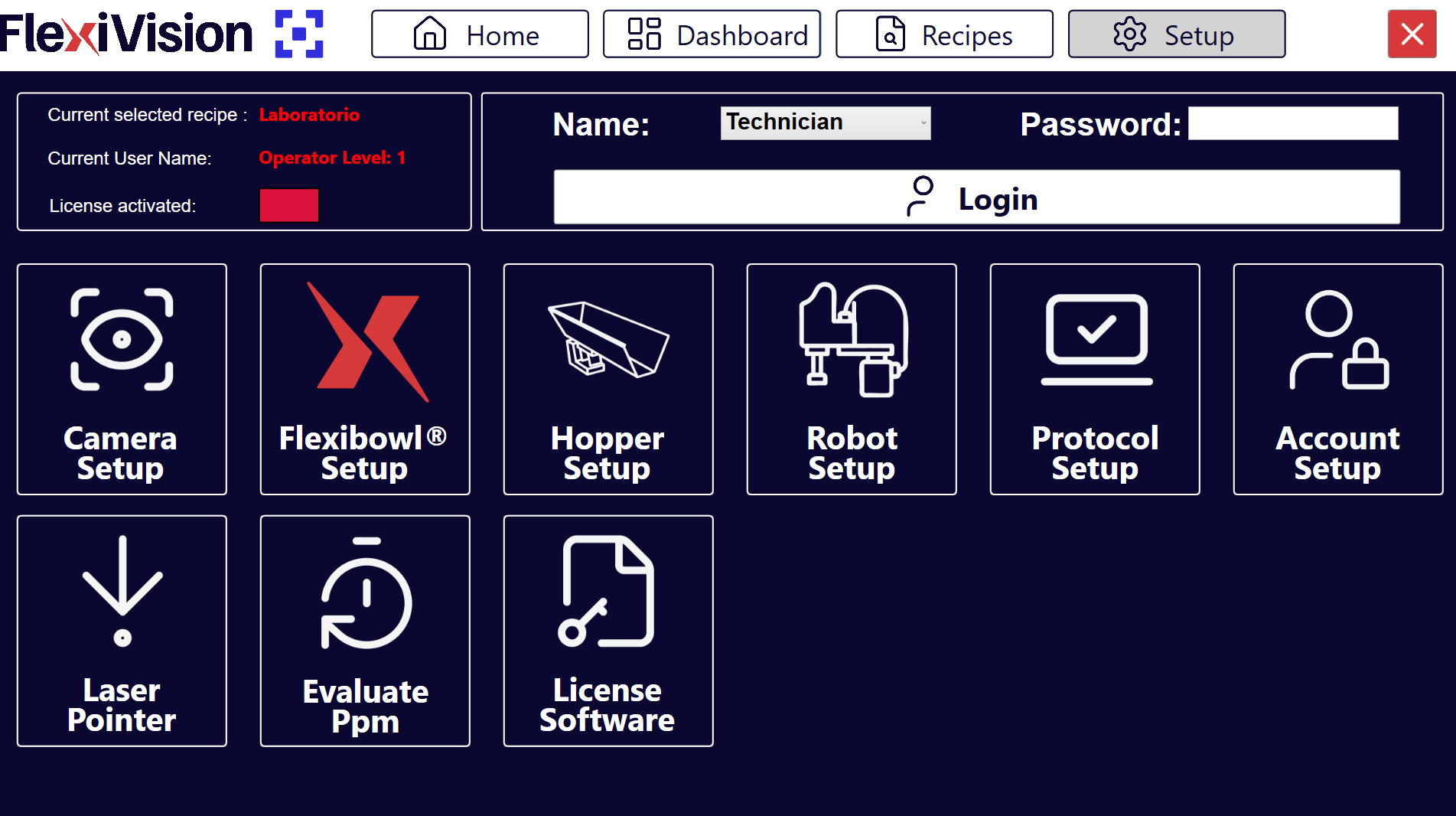
Suchen Sie auf der SETUP-Seite das Symbol Roboter Setup und klicken Sie darauf Setup-Seite
|
3 |
Die Seite zur Konfiguration der Roboterkommunikation wird geöffnet |
Übersicht über die Benutzeroberfläche Roboter-Setup#
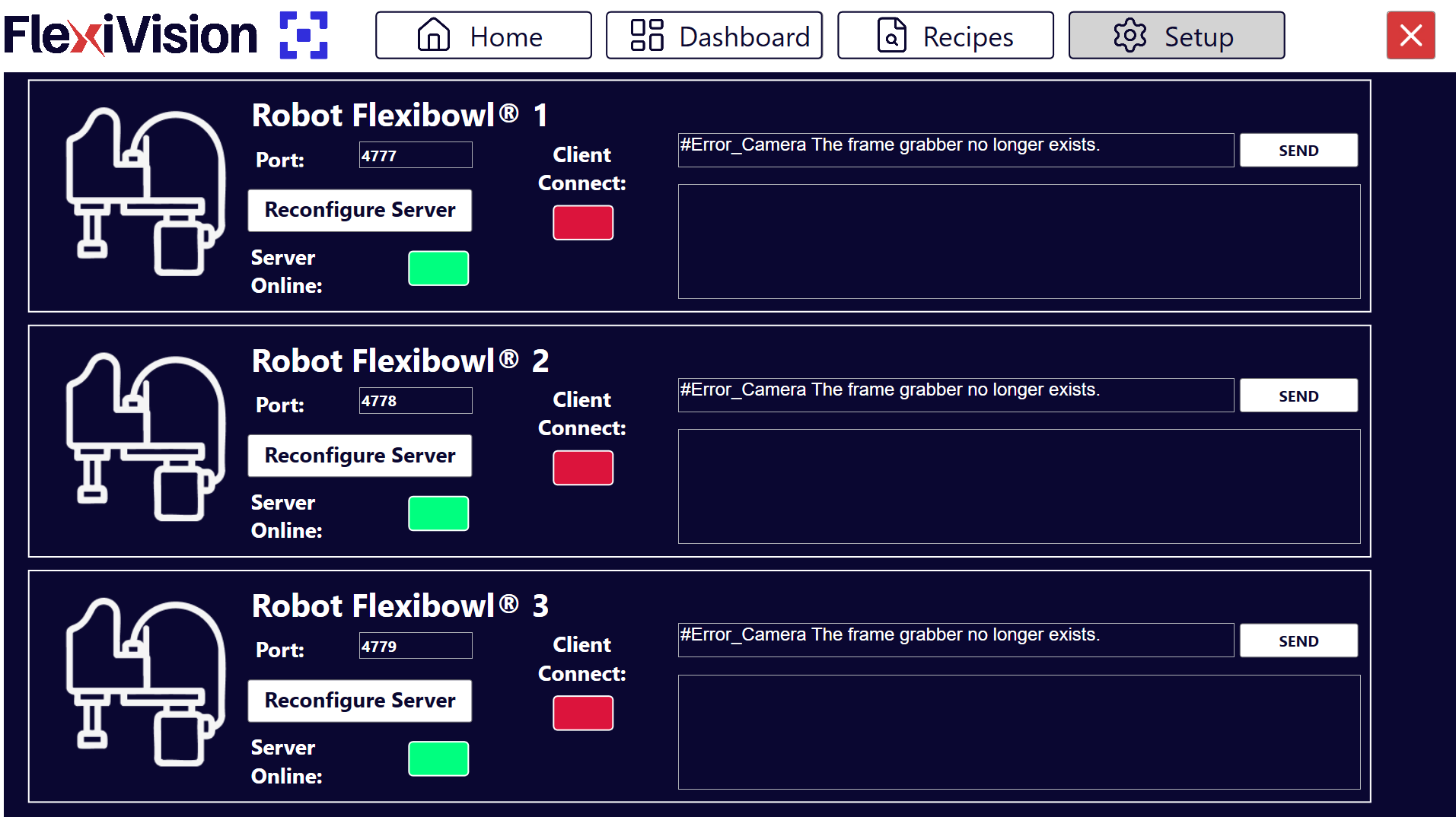
Die Seite Roboter-Setup enthält mehrere Abschnitte zum Konfigurieren und Testen der Kommunikation:
Abschnitt |
Beschreibung |
|---|---|
Port |
TCP/IP-Port, über den der Roboter kommuniziert (auf der Robotersteuerung konfiguriert) |
Reconfigure Server |
Schaltfläche zum Neukonfigurieren des Kommunikationsservers mit neuen Parametern |
Server Online |
Statusanzeige des FlexiVision One Servers (grün = Server aktiv und erreichbar) |
Client Connect |
Statusanzeige des Roboter-Clients (grün = Roboter verbunden) |
Roboter-Flexivision-Meldungen |
Log-Fenster, die die zwischen Roboter und FlexiVision One ausgetauschten Meldungen anzeigen (wird zum Debuggen verwendet):
|
Konfigurationsverfahren#
Schritt 1: Eingabe des Kommunikationsports#
Der TCP/IP-Port ist der entscheidende Parameter, der zwischen Roboter und FlexiVision One übereinstimmen muss:
4 |
Geben Sie im Feld Port die TCP/IP-Portnummer ein, mit der der Roboter kommunizieren soll. |
Note
Standardwert: (Standard-Port FlexiVision One)
Die Portnummer muss:
mit der im Roboterprogramm konfigurierten übereinstimmen
zwischen 1024 und 65535 liegen (Benutzerports)
keinen Konflikt mit anderen Diensten im Netzwerk verursachen
Warning
Es ist wichtig, dass die Portnummer auf beiden Seiten identisch ist:
FlexiVision One: Auf dieser Seite konfigurierter Port
Roboter: Im Roboterprogramm konfigurierter Port
Wenn die Nummern nicht übereinstimmen, schlägt die Verbindung immer fehl.
Beispiel:
❌ FALSCH: FlexiVision One Port 2000, Robot Port 2001 → Keine Kommunikation
✅ RICHTIG: FlexiVision One Port 2000, Robot Port 2000 → Kommunikation funktioniert
Schritt 2: Neukonfiguration des Servers#
Nach der Einstellung des richtigen Ports muss der Kommunikationsserver neu gestartet werden:
5 |
Klicken Sie auf die Schaltfläche Reconfigure Server |
6 |
Bitte warten Sie einige Sekunden, bis die Neukonfiguration abgeschlossen ist. |
Note
In den folgenden Fällen müssen Sie jedes Mal auf Reconfigure Server klicken:
Die Portnummer wird geändert
Der Server soll nach einem Fehler neu gestartet werden
Die Netzwerkkonfiguration des VisionControllers wurde geändert
Der Abbruch bestehender Verbindungen soll erzwungen werden
Der Server startet beim Öffnen der FlexiVision One-Software automatisch, muss jedoch nach Änderungen manuell neu konfiguriert werden.
Schritt 3: Serverstatus überprüfen#
Überprüfen Sie nach der Neukonfiguration, ob der Server aktiv ist:
7 |
Beobachten Sie die Anzeige „Server Online“: |
Grün: Server aktiv |
8 |
Nachdem Sie das Programm vom Roboter aus gestartet haben, beobachten Sie die Anzeige Client Online: |
Grün: Roboter verbunden |
Note
Wenn die Anzeigen grün leuchten, ist das System ordnungsgemäß angeschlossen.
Wenn eine der Anzeigen rot leuchtet, überprüfen Sie Folgendes:
Überprüfen Sie, ob das Programm auf dem Roboter gestartet wurde
Überprüfen Sie, ob sich die IP-Adressen im selben Subnetz befinden
Überprüfen Sie, ob der Port nicht bereits von einem anderen Programm verwendet wird
Überprüfen Sie die Systemprotokolle auf Fehlermeldungen
Schritt 4: Speichern und Abschluss#
9 |
Überprüfen Sie, ob die Verbindung zwischen Roboter und FlexiVision One stabil ist |
10 |
Die Kommunikationsparameter werden automatisch gespeichert |
11 |
Kehren Sie zur SETUP Hauptseite zurück |
Nächste Schritte#
Sobald das Roboter-Setup abgeschlossen ist, fahren Sie fort mit: