Erstellen von Rezepten und Modellen - Überbsicht#
Dieser Abschnitt führt den Benutzer durch den gesamten Prozess der Erstellung eines Anwendungsrezepts und der für die Erkennung und das robotergestützte Picking erforderlichen Werkstückmodelle.
Note
Voraussetzungen
Bevor Sie mit der Erstellung von Rezepten und Modellen fortfahren, stellen Sie sicher, dass:
Alle Hardware-Einstellungen sind abgeschlossen (Component Setup)
Die Kamerakalibrierung wurde erfolgreich durchgeführt (Camera Calibration)
Die Roboterkalibrierung ist abgeschlossen
Die zu erkennenden physischen Teile sind verfügbar
Rezept vs. Modell: Grundlegende Unterschiede#
Bevor wir beginnen, ist es wichtig, den Unterschied zwischen Rezept und Modell zu verstehen:
Was ist ein Rezept? |
Was ist ein Modell? |
|---|---|
Der übergeordnete Sammelbegriff für die gesamte Picking-Anwendung. |
Die spezifische Definition einer einzelnen anzuerkennenden Komponente. |
Beinhaltet bis zu 8 Modelle, FlexiBowl®-Parameter, Trichter und Kommunikationslogiken. |
Umfasst Trainingsbilder, ROIs, visuelle Merkmale, Filter und Roboter-Offsets. |
Verwaltet Hardware-Parameter (Vibrationen, Geschwindigkeit) und Netzwerkparameter (TCP/IP-Port, Timeout). |
Verwaltet Bildverarbeitungsparameter (Schwellenwert, Mindestwert) und Entnahmekoordinaten (Greifer). |
Kann mehrere Teiletypen gleichzeitig verwalten (Multi-Modell). |
Konzentriert sich auf ein spezifisches visuelles Muster. |
Tip
Ein Rezept kann bis zu 8 verschiedene Modelle enthalten, sodass der Roboter verschiedene Arten von Teilen aus derselben Anwendung erkennen und entnehmen kann, ohne die Konfiguration zu ändern.
VÜberblick über den gesamten Prozess#
Der Prozess zur Erstellung eines vollständigen und funktionsfähigen Rezepts gliedert sich in mehrere aufeinanderfolgende Phasen:
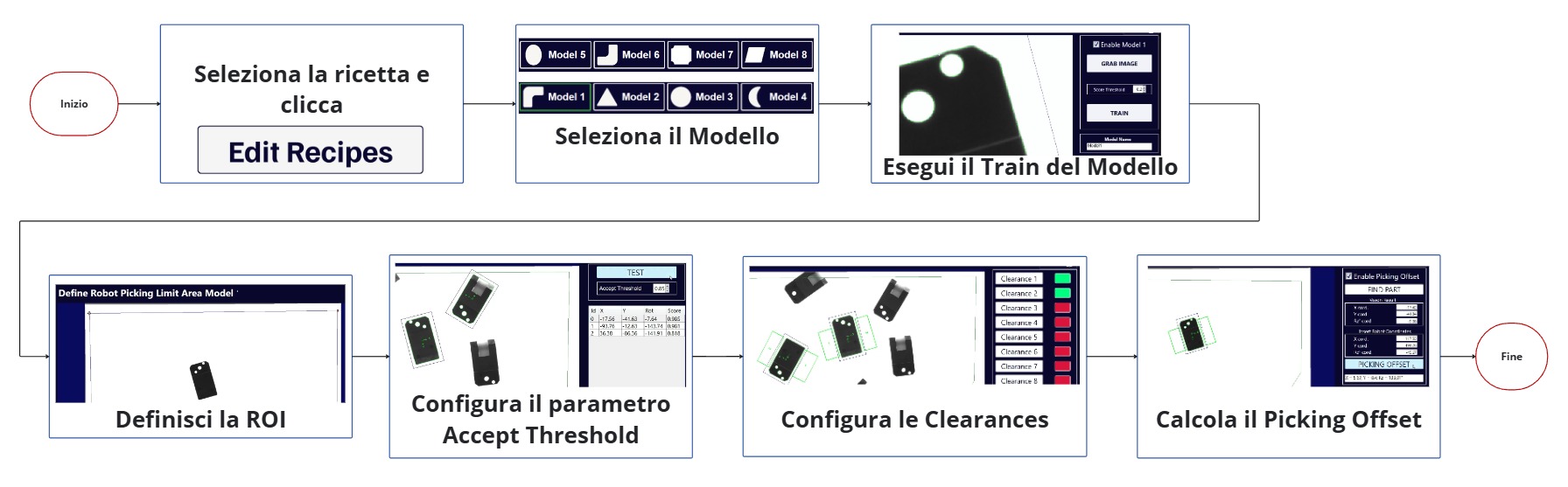
Vollständiges Schema des Prozesses zur Rezept- und Modellerstellung#
Hauptphasen#
Phase |
Name |
Beschreibung |
|---|---|---|
1 |
Rezepterstellung |
Definition des Anwendungsrezepts mit Name, Typ und verwendetem FlexiBowl® |
2 |
Phaysische Vorbereitung |
Positionierung des Referenzteils im Sichtfeld |
3 |
Modelltraining |
Bildaufnahme und Erstellung des Erkennungsmusters |
4 |
ROI-Definition |
Festlegung des Suchbereichs, in dem nach den Teilen gesucht werden soll |
5 |
Filtereinstellung |
Konfiguration akzeptieren Schwellenwert und Erkennungstoleranzen |
6 |
Physische Vorbereitung |
Picking-Simulation mit dem Roboter, um die Objekte zu positionieren, die den Platzbedarf des Greifers simulieren sollen |
7 |
Speichern der Koordinaten |
Speichern der Roboterkoordinaten an der Picking-Position des Referenzbauteils |
8 |
Erstellen von Freiräumen |
Definition von Bereichen, die frei bleiben müssen (Greiferbereich, Hindernisse) |
9 |
Roboterkoordinaten |
Berechnung des Greifer-Offsets für die korrekte Entnahme |
10 |
Test und Validierung |
Überprüfung der vollständigen Funktionsweise und Speichern des Rezepts |
Praktische Tipps vor dem Start#
Materialvorbereitung#
Tip
Checkliste zur Vorbereitung
Bevor Sie mit der Erstellung von Modellen beginnen, bereiten Sie Folgendes vor:
Mindestens 10–20 Teile des zu erkennenden Typs (zum Testen)
Saubere und in gutem Zustand befindliche Teile (repräsentativ für die Produktion)
Simulatoren für den Platzbedarf des Greifers (es dürfen KEINE Teile desselben Typs sein, da es wichtig ist, diese nicht mit dem Referenzteil zu verwechseln.)
Blatt zum Notieren der Roboterkoordinaten (X, Y, RZ)
Leerer und sauberer FlexiBowl®
Hintergrundbeleuchtung/Toplight eingeschaltet
Optimale Umgebung#
Note
Ideale Bedingungen für das Training
Stabile Beleuchtung (direktes, wechselndes Sonnenlicht vermeiden)
FlexiBowl® stillstehend
Roboter in sicherer Position (darf die Aufnahme nicht stören)
FlexiVision One-Software geöffnet und Basisrezept geladen
Häufige Fehler, die es zu vermeiden gilt#
Error
Vermeiden Sie diese häufigen Fehler
❌ Roboterkordinaten werden während der physischen Vorbereitung nicht gespeichert → Greifer-Offset kann nicht berechnet werden
❌ Das Teil wird nach dem Speichern der Koordinaten verschoben → falscher Offset
❌ Feature-Schwellenwert zu niedrig → Modell zu detailliert, erkennt Oberflächenstruktur
❌ ROI zu engl → Teile an den Rändern werden nicht erkannt
❌ Abstände zu klein → Kollisionen des Greifers mit benachbarten Teilen
❌ Nicht mit mehreren Teilen testen → Probleme werden erst in der Produktion erkannt
Befolgen Sie die in den folgenden Abschnitten beschriebenen Schritte genau, um diese Probleme zu vermeiden.
Unterstützung und weitere Ressourcen#
Note
INFO-Schaltfläche
In jedem der Arbeitsbereiche befindet sich oben rechts eine INFO-Schaltfläche.
Über diese Schaltfläche wird eine Schritt-für-Schritt-Anleitung aufgerufen, die auch im Video-Tutorial zu sehen ist.
Technische Unterstützung: support@arsautomation.com für Unterstützung
Bei spezifischen Problemen beim Erstellen von Vorlagen lesen Sie bitte den Abschnitt Troubleshooting.
Nächste Schritte#
Sobald Sie den Überblick über den Prozess gewonnen haben, fahren Sie mit der eigentlichen Erstellung fort:
→ Start: Neues Rezept erstellen