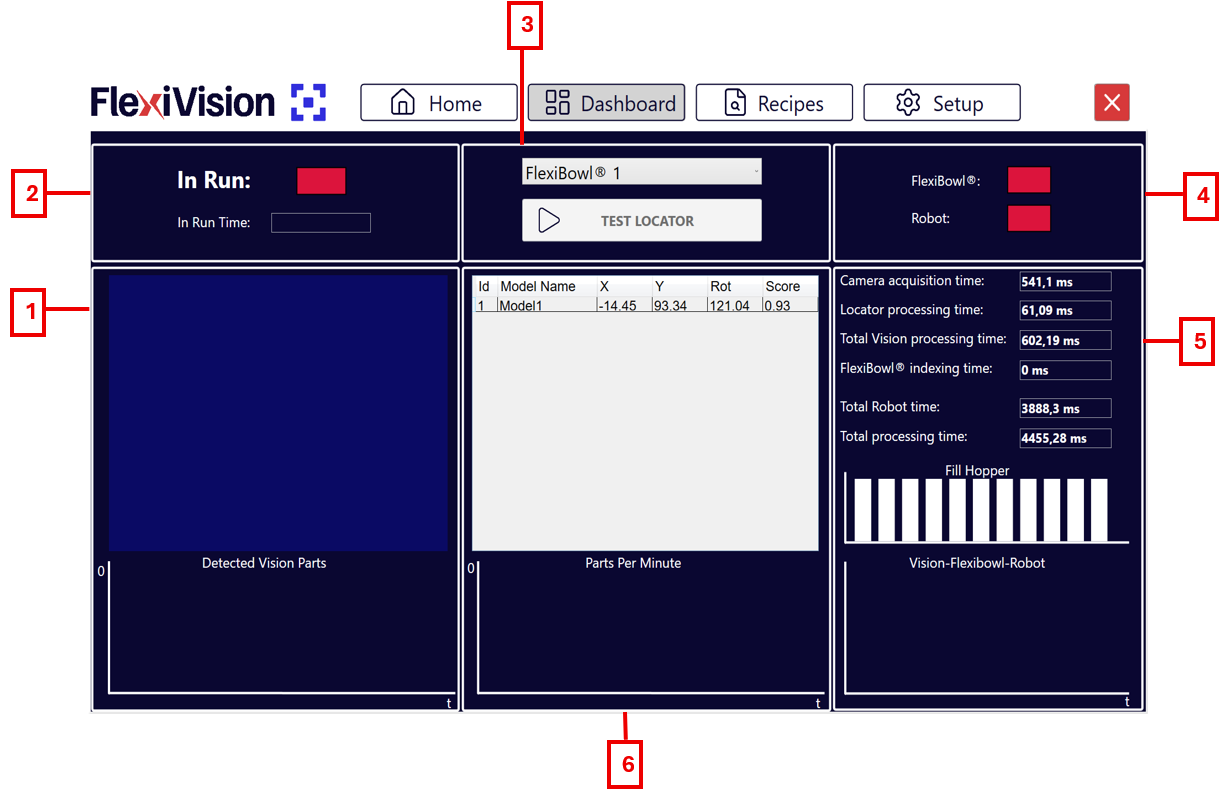
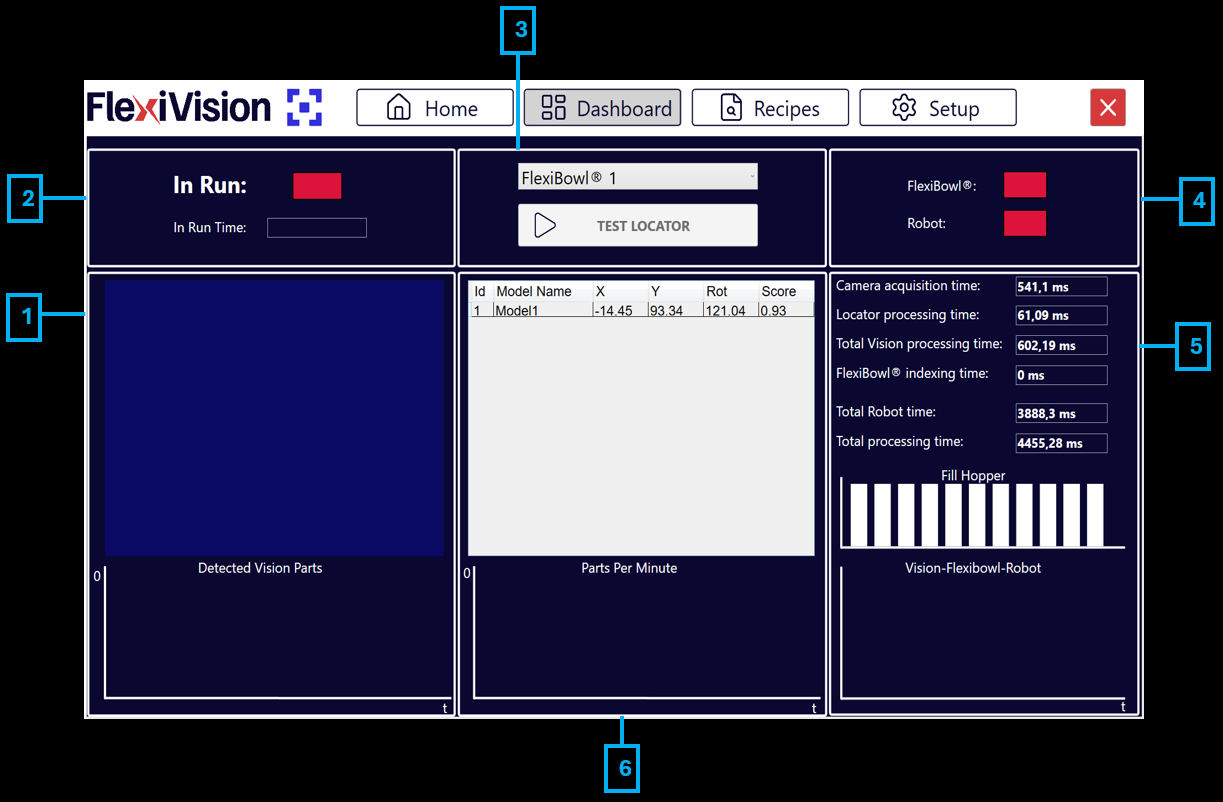
Página DashBoard#
# |
Descripción |
|---|---|
1 |
Visión y área de detección
|
2 |
Estado de funcionamiento
|
3 |
Controles y Selección
|
4 |
Estado de la conexión
|
5 |
Análisis del tiempo de ciclo (Timings)
|
6 |
Gráficos de rendimiento e historial
|
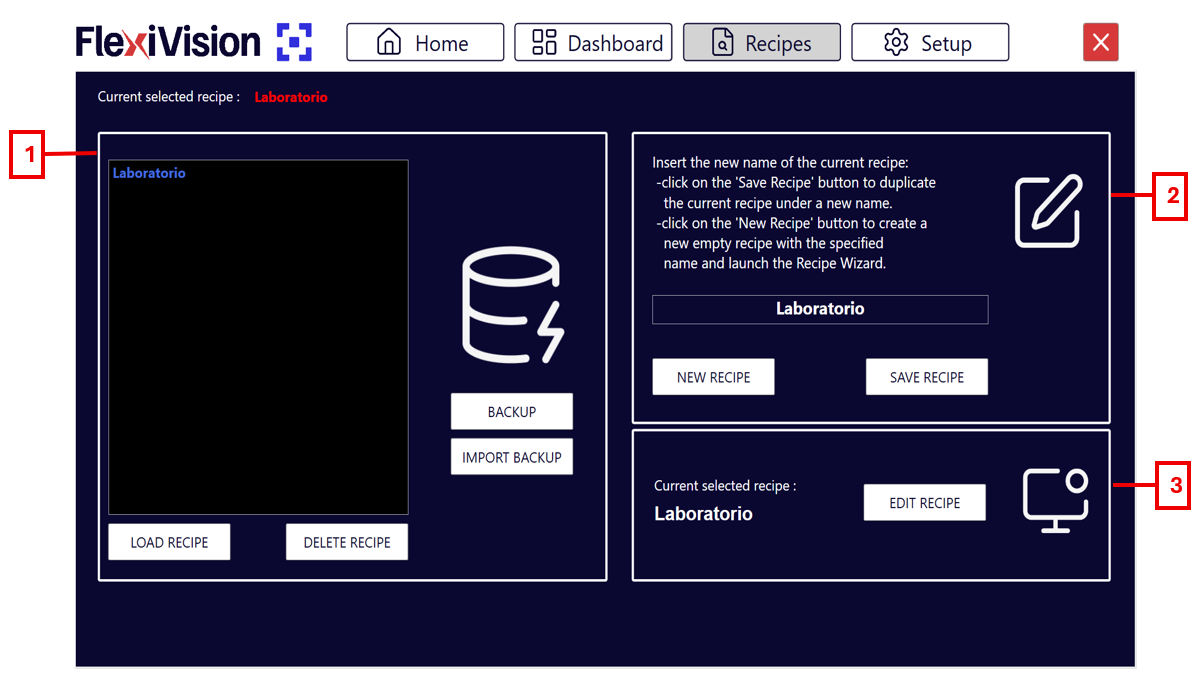
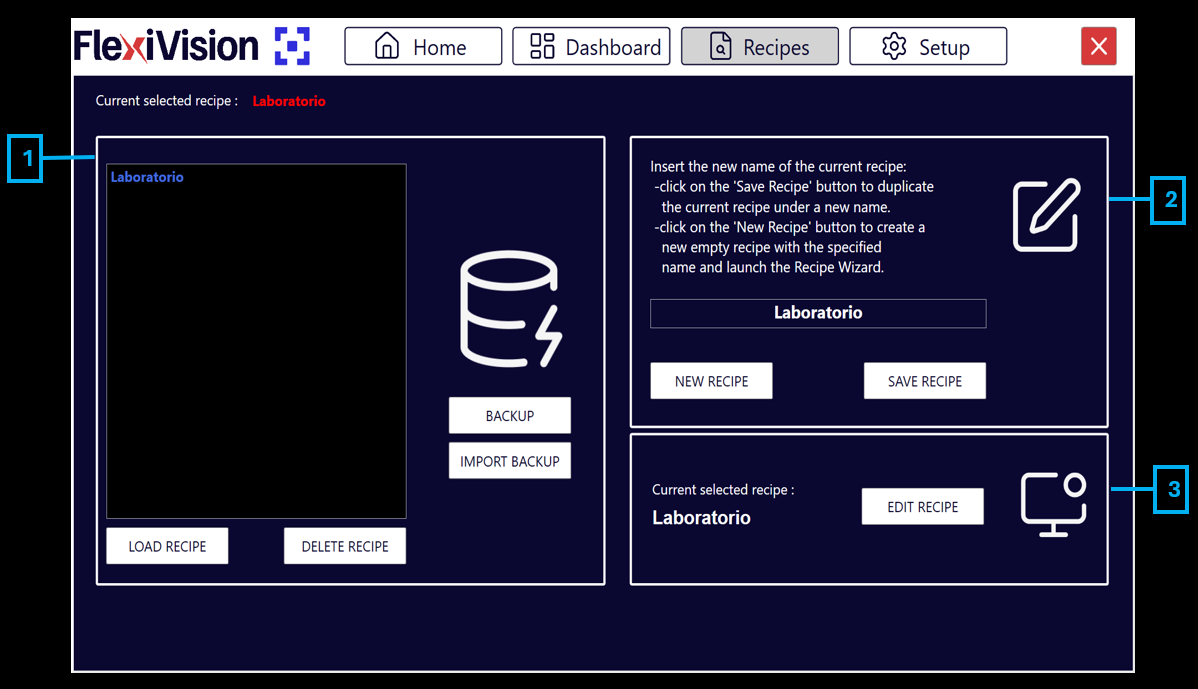
Página de recetas#
# |
Descripción |
|---|---|
1 |
Gestión de la base de datos de recetas
|
2 |
Crear y guardar
|
3 |
Editar receta
|
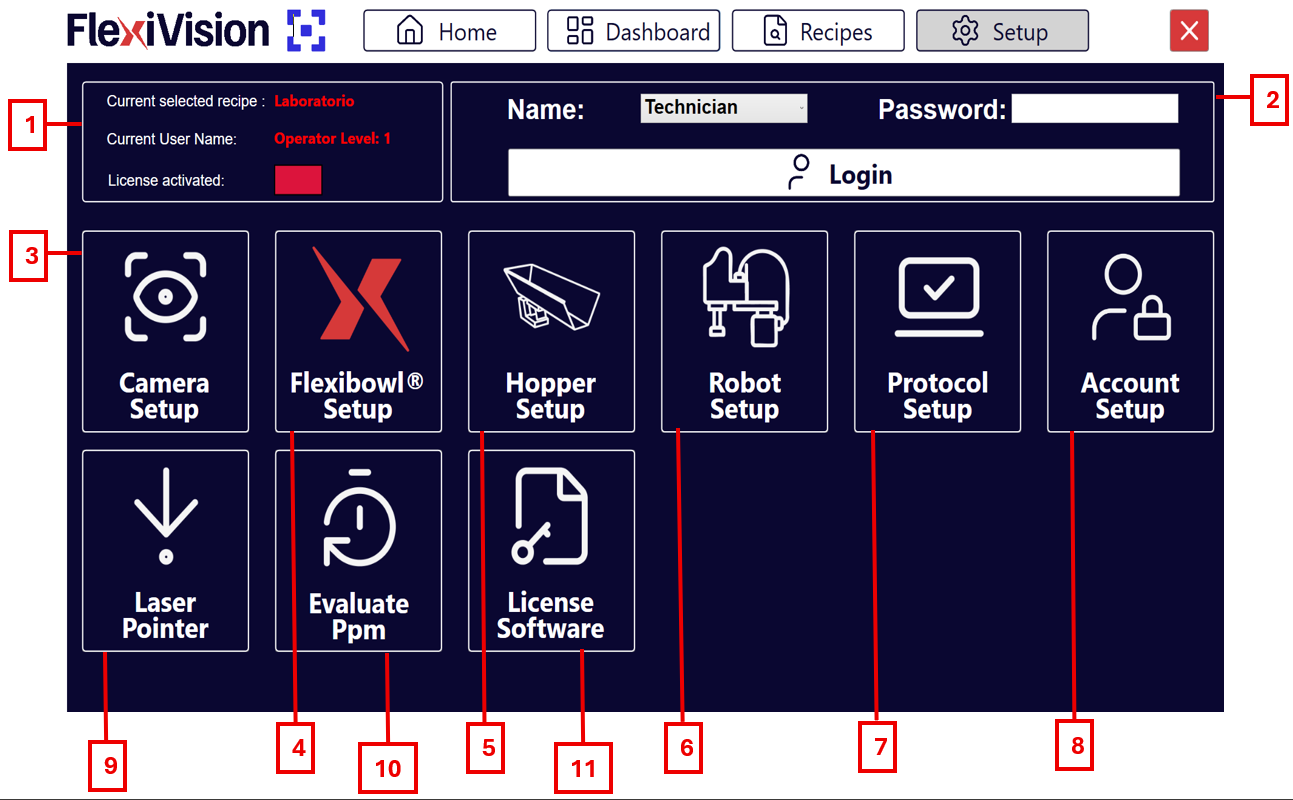
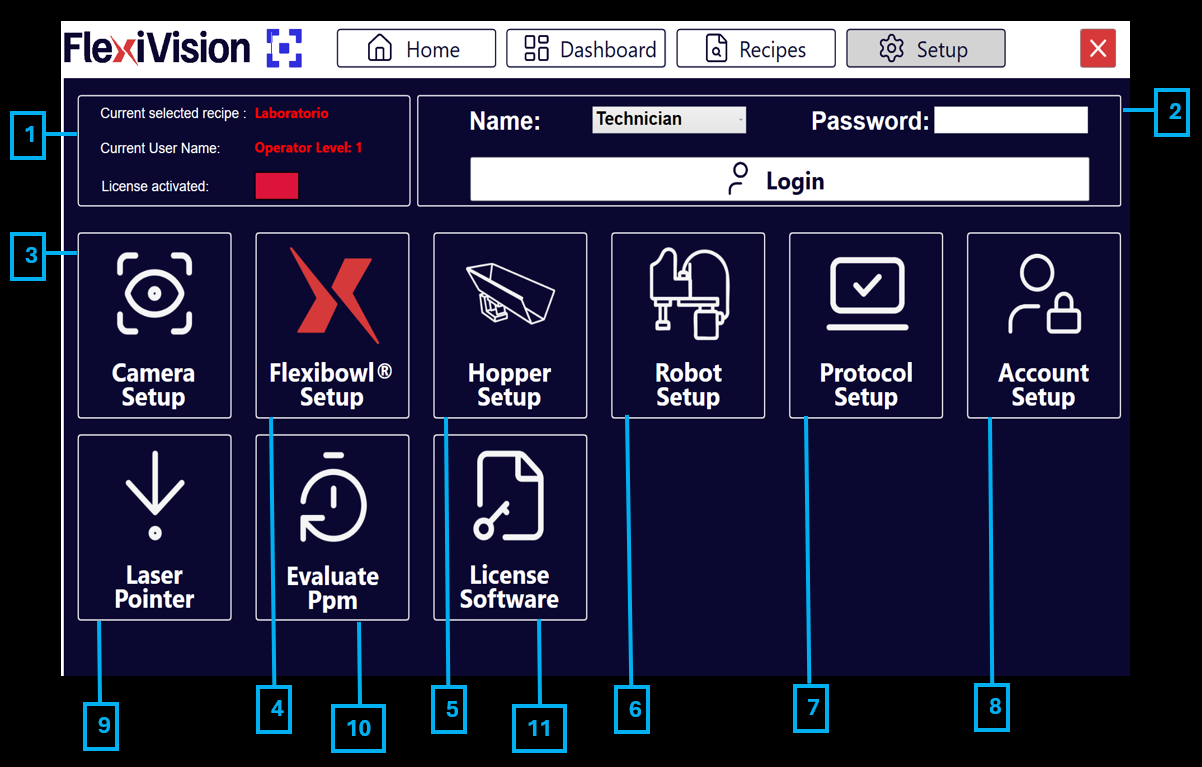
Página de configuración#
# |
Descripción |
|---|---|
1 |
Información de estado
|
2 |
Panel de acceso
|
3 |
Camera setup: sección dedicada a la configuración de los parámetros de la cámara. |
4 |
FlexiBowl® setup: zona para configurar los parámetros de movimiento y control del FlexiBowl®. |
5 |
Hopper setup: configuración de los parámetros de la tolva (vibración y descarga). |
6 |
Robot setup: sección para configurar la comunicación con el robot. |
7 |
Protocol setup: página de configuración de parámetros que define cuántos objetos debe o puede devolver la visión en cada ciclo, en qué orden se priorizan y qué valores estadísticos utilizar en función del número de tomas del robot y del tiempo máximo de manipulación de cada componente. |
8 |
Account setup: permite configurar las distintas cuentas de usuario en función de los niveles de acceso. |
9 |
Laser pointer: permite utilizar un instrumento láser para simular un pick en ausencia del robot. |
10 |
Evaluate PPM: permite estimar las partes por minuto (PPM) al utilizar el puntero láser. |
11 |
Licence software: página para la activación de la licencia de software. |
Los botones INFO#
En cada una de las secciones operativas, está disponible un botón INFO en la parte superior derecha. Dentro de este botón está disponible la explicación del procedimiento Step By Step; el mismo procedimiento puede verse en el videotutorial.