Calibración Robot Pick#
En esta página veremos cómo enlazar las coordenadas de la visión con las del robot para permitir un picking preciso de los componentes.
¿Qué es Robot Pick? La función Robot Pick calcula el desfase entre las coordenadas detectadas por FlexiVision One y las coordenadas reales del robot, lo que permite al robot recoger los componentes en la posición correcta.
Danger
¡Coordenadas fundamentales del robot!
Esta fase requiere OBLIGATORIAMENTE las coordenadas X, Y, Rz guardadas durante la preparación física de la configuración (Paso 1 de la sección Clearances).
Sin estas coordenadas, no se puede completar el calibrado. Si se pierden o se olvidan, será necesario repetir toda la preparación física con el robot.
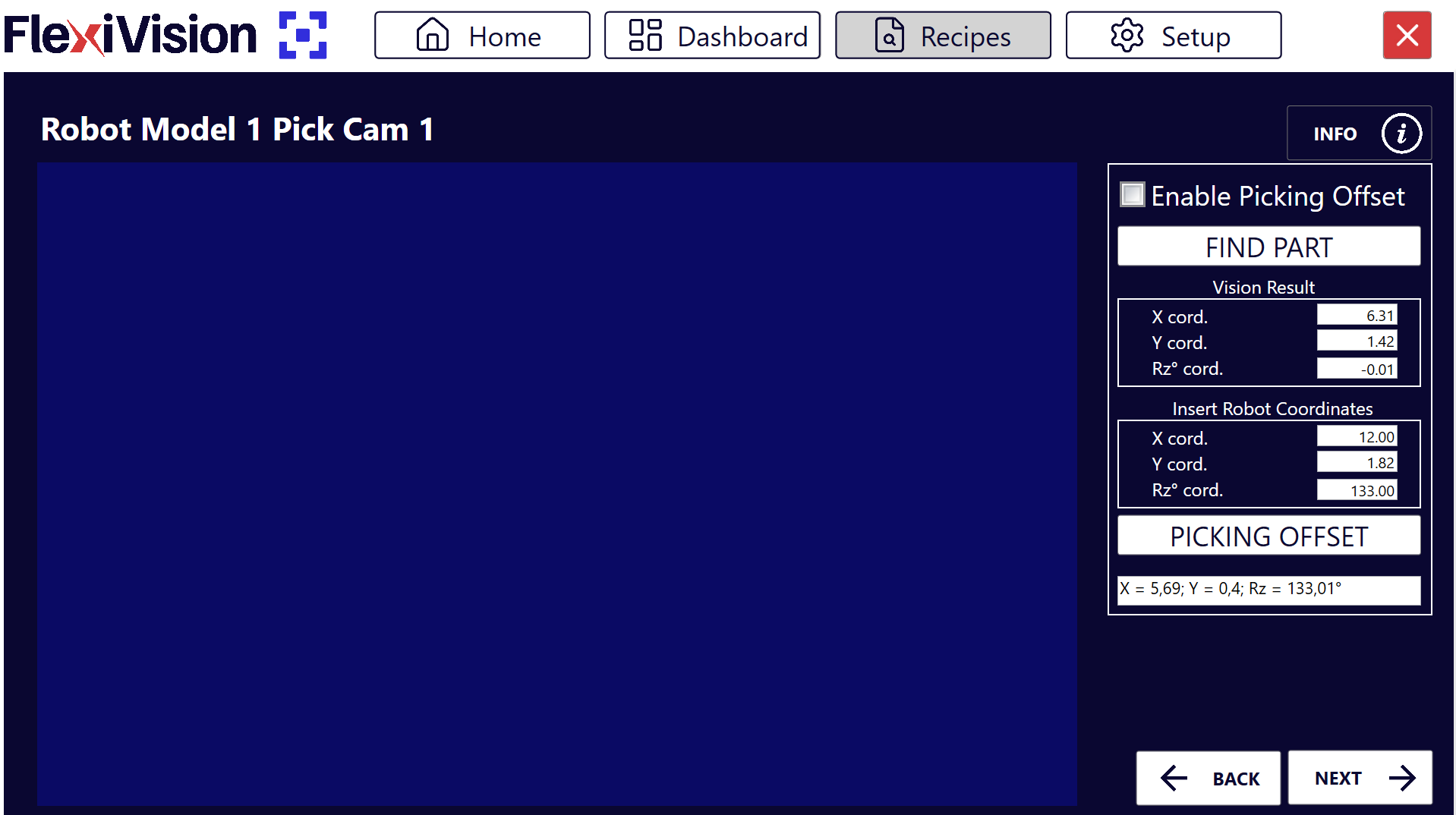
Visión general de la interfaz de Robot Pick#
Tras hacer clic en “Siguiente” en la página de Clearances, se abre la página Robot Model Pick.
Sección |
Parámetro |
Función |
|---|---|---|
Activar |
Activar Robot Pick |
Activa la calibración del robot |
Visión Resultado |
X cordón |
Coordenada X detectada por visión |
Visión Resultado |
Cordón Y |
Coordenada Y detectada por visión |
Visión Resultado |
Cordón RZ |
Rotación Z detectada por visión |
Insertar coordenadas del robot |
X cordón |
Coordenada X del robot (a insertar) |
Insertar coordenadas del robot |
Cordón Y |
Coordenada Y del robot (a insertar) |
Insertar coordenadas del robot |
Cordón RZ |
Rotación Z del robot (a insertar) |
Función |
Descripción |
|---|---|
Buscar objeto |
Detectar el componente y mostrar las coordenadas |
Desplazamiento de selección |
Calcula el desplazamiento para la recogida correcta |
Paso 1: Activación y detección de componentes#
1 |
Haga clic en Activar Robot Pick |
2 |
Haga clic en
Note Visión Resultado: Estas son las coordenadas que FlexiVision One “ve” en la imagen. Aún no están conectadas al sistema de coordenadas del robot. |
 :
:Tip
Si tiene alguna duda durante la configuración, consulte el botón INFO de la página actual.
Paso 2: Entrada de coordenadas del robot y cálculo del desplazamiento#
3 |
En la casilla Insertar coordenadas del robot, introduzca las coordenadas guardadas al crear el modelo:
Danger Utilice las coordenadas guardadas durante la configuración del modelo. ¡Sin estas coordenadas, la calibración será errónea! Las coordenadas deben introducirse con máxima precisión:
Los errores en esta fase provocan desplazamientos del robot completamente erróneos, lo que da lugar a intentos de recogida en posiciones equivocadas (incluso decenas de centímetros de error). La inobservancia de estos dos puntos podría provocar colisiones del robot que dañarían el FlexiBowl®, los componentes o el propio robot. |
4 |
Haga clic en
|

¿Cómo funciona el Gripper Offset?
El sistema compara:
Coordenadas de visión: donde FlexiVision One “ve” el origen del componente
Coordenadas del robot: donde el robot agarró realmente el componente
Calcula la diferencia y la almacena como offset. Este desplazamiento se aplicará a todos los componentes detectados en el futuro, garantizando que el robot siempre recoja en la posición correcta.
Tip
Si tiene alguna duda durante la configuración, consulte el botón INFO de la página actual.
Paso 3: Finalizar y guardar#
5 |
Haciendo clic en |
6 |
Haga clic en Guardado completo El guardado incluye:
|
 , volveremos a la página de las recetas
, volveremos a la página de las recetas 
 para guardar toda la configuración
para guardar toda la configuraciónModelos múltiples - Añadir más modelos#
Paso 4: Modelos adicionales (opcional)#
7 |
Para crear modelos adicionales en la misma receta:
Tip Cada modelo en la receta puede tener configuraciones diferentes (ROI, clearance, offset), lo que permite gestionar componentes con características distintas en la misma aplicación. |

See also
Para cualquier problema en los pasos recién completados, consulte Solución de problemas