2 FlexiBowl® y 2 Cámaras#
Esta sección describe las configuraciones disponibles cuando se desea operar con dos FlexiBowl® y dos cámaras gestionadas por un único VisionController FlexiVision One.
Resumen de la configuración#
En una configuración 2 FlexiBowl® + 2 Cámaras, el sistema consta de dos estaciones independientes de alimentación y visión, ambas controladas por el mismo VisionController. Cada estación consta de:
1 FlexiBowl®
1 Cámara con óptica dedicada
1 Tolva (opcional, si existe)
Las dos estaciones se comunican con el VisionController a través de un Switch de red.
Important
El Switch es un componente obligatorio en todas las configuraciones multidispositivo. Sin él no es posible conectar simultáneamente varios FlexiBowl® y varias cámaras al VisionController. Para las especificaciones técnicas y los códigos de pedido, consulte la sección Switch.
Esta configuración admite dos variantes de funcionamiento, en función del número de robots disponibles en la planta:
Variante A |
Variante B |
|
|---|---|---|
Robot |
1 |
2 |
FlexiBowl® |
2 |
2 |
Cámaras |
2 |
2 |
Lógica de funcionamiento |
El robot llega a las dos estaciones |
Cada robot está dedicado a una estación |
Switch requerido |
Sí |
Sí |
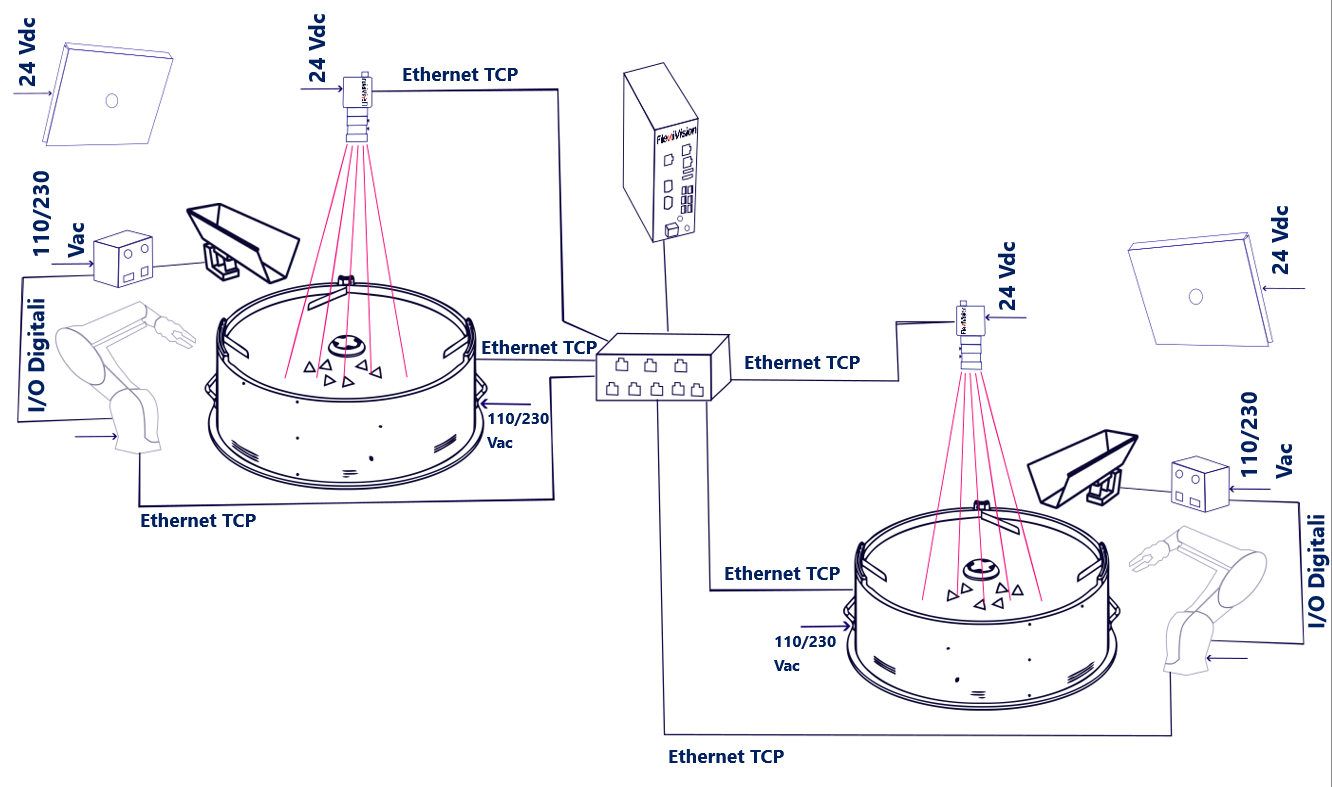
Variante A - 1 Robot, 2 FlexiBowls#
En esta variante, un solo robot opera en ambas estaciones. El robot se posiciona de forma que pueda alcanzar la zona de picking de cada FlexiBowl®, alternando el picking entre las dos estaciones en función de las órdenes recibidas.
Cada estación ejecuta su propia receta independiente. En cada estación puede configurarse una aplicación de tipo Standard o Mix, con diferentes modelos de componentes dentro de la misma receta.
Parámetro |
Valor |
|---|---|
FlexiBowl® |
2 |
Cámaras |
2 |
Robot |
1 |
Switch requerido |
Sí |
Important
Receta básica y gestión de recetas
Al igual que en la configuración simple, en una configuración 2FB + 2CAM el proceso comienza con la creación de una única receta básica, que contiene la configuración del hardware y la calibración de la cámara para todo el sistema. A continuación, esta receta de base se duplica para cada estación: cada duplicado constituye la receta de funcionamiento de dicha estación, dentro de la cual se crean los modelos de piezas (hasta 8 por estación).
Por lo tanto, es crucial que la asociación entre los dispositivos se configure correctamente desde el principio:
Cámara 1 → FlexiBowl® 1 (+ Tolva 1, si existe)
Cámara 2 → FlexiBowl® 2 (+ Tolva 2, si existe)
Una asociación incorrecta durante la configuración afectaría a todas las recetas derivadas, comprometiendo el reconocimiento de las piezas y el correcto funcionamiento de todo el sistema.
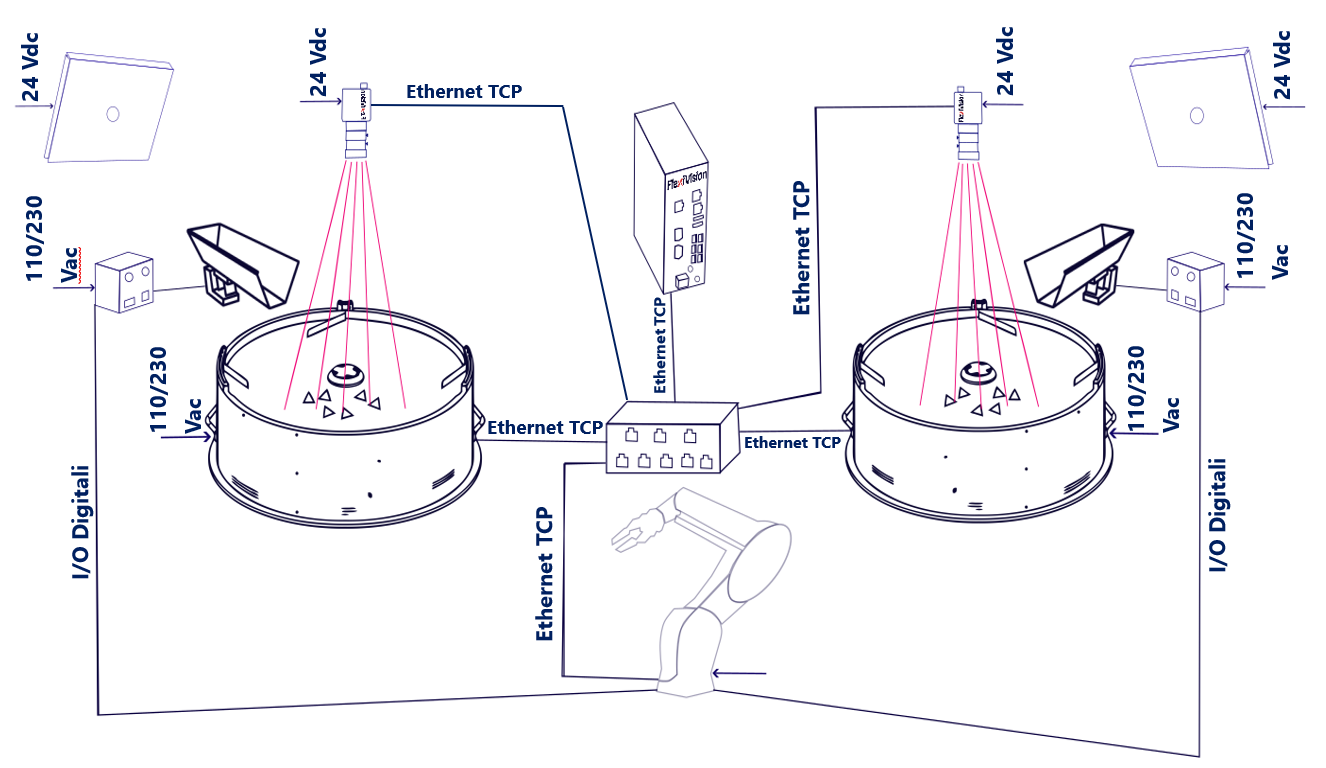
Variante B - 2 Robots, 2 FlexiBowl®#
En esta variante, cada robot se dedica a una única estación: el Robot 1 recoge en el FlexiBowl® 1, el Robot 2 recoge en el FlexiBowl® 2. Las dos células son independientes y no se solapan.
También en esta variante, cada estación admite aplicaciones tanto de tipo Standard como Mix.
Parámetro |
Valor |
|---|---|
FlexiBowl® |
2 |
Cámaras |
2 |
Robot |
2 |
Switch requerido |
Sí |
Tip
Esta variante garantiza la máxima productividad, con las dos células operando en paralelo y de forma completamente autónoma.
Important
Receta básica y gestión de recetas
Al igual que en la configuración simple, en una configuración 2FB + 2CAM el proceso comienza con la creación de una única receta básica, que contiene la configuración del hardware y la calibración de la cámara para todo el sistema. A continuación, esta receta de base se duplica para cada estación: cada duplicado constituye la receta de funcionamiento de dicha estación, dentro de la cual se crean los modelos de piezas (hasta 8 por estación).
Por lo tanto, es crucial que la asociación entre los dispositivos se configure correctamente desde el principio:
Cámara 1 → FlexiBowl® 1 (+ Tolva 1, si existe)
Cámara 2 → FlexiBowl® 2 (+ Tolva 2, si existe)
Una asociación incorrecta durante la configuración afectaría a todas las recetas derivadas, comprometiendo el reconocimiento de las piezas y el correcto funcionamiento de todo el sistema.
Componentes necesarios#
Kit básico FlexiVision One#
El kit básico FlexiVision One (suministrado con el sistema) ya incluye todo lo necesario para la primera estación (cámara, óptica, cables, rejilla de calibración). No es necesario adquirir un segundo kit completo para la segunda estación.
Kit de cámara adicional#
Para la segunda estación, sólo tiene que adquirir el Kit de cámara adicional, que está disponible en una versión específica para cada tamaño de FlexiBowl®. El kit incluye:
1 Cámara
1 Óptica dedicada al tamaño FlexiBowl®
1 Rejilla de calibración
1 Cable de alimentación de la cámara
2 Cables Ethernet
Seleccione el kit en función del tamaño del segundo FlexiBowl®:
Tamaño FlexiBowl® |
Código Kit Cámara Adicional |
Óptica incluida |
|---|---|---|
FB 200 |
GM002002 |
CE000881 — FlexiVision One 35mm Optic |
FB 350 |
GM002003 |
CE000881 — FlexiVision One 35mm Optic |
FB 500 |
GM002004 |
CE000880 — FlexiVision One 25mm Optic |
FB 650 |
GM002005 |
CE000879 — FlexiVision One 16mm Optic |
FB 800 |
GM002006 |
CE000879 — FlexiVision One 16mm Optic |
FB 1200 |
GM002007 |
CE000878 — FlexiVision One 12mm Optic |
Note
Si las dos estaciones utilizan FlexiBowl® de tamaños diferentes, el Kit de Cámara Adicional debe seleccionarse en función del tamaño del FlexiBowl® de la segunda estación. La primera estación ya está cubierta por el kit básico.
Switch#
El Switch siempre es necesario en las configuraciones multidispositivo. Para las especificaciones de código, eléctricas y físicas, consulte la sección dedicada:
→ Switch
Cableado#
El diagrama de cableado es idéntico para ambas variantes: todos los dispositivos de campo (FlexiBowl®, cámaras, robots) se conectan al Switch, y el Switch se conecta al VisionController a través de un único puerto Ethernet. La diferencia entre la Variante A y la Variante B sólo afecta al número de robots conectados al Switch.
Important
El Switch dispone de 8 puertos Ethernet. Compruebe que el número total de dispositivos a conectar no supera la capacidad disponible, teniendo en cuenta todos los FlexiBowl®, cámaras y robots presentes.
Diagrama de conexión#
Dispositivo |
Conexión |
|---|---|
FlexiBowl® 1 |
Puerto Ethernet → Switch |
FlexiBowl® 2 |
Puerto Ethernet → Switch |
Cámara 1 |
Cable Ethernet → Switch |
Cámara 2 |
Cable Ethernet → Switch |
Robot 1 |
Puerto Ethernet → Switch |
Robot 2 (solo Variante B) |
Puerto Ethernet → Switch |
Switch |
Puerto Ethernet → VisionController |
Tip
Asegúrese de que cada dispositivo tiene asignada una dirección IP única en la misma subred. Los puertos TCP/IP utilizados por el VisionController para las dos estaciones son configurables: por defecto FB1 → 4001, FB2 → 4002. Consulte la sección Protocolo de comunicación Robot-Vision para obtener más detalles.
Puertos Switch ocupados por variante#
Puerto Switch |
Variante A (1 Robot) |
Variante B (2 Robots) |
|---|---|---|
1 |
FlexiBowl® 1 |
FlexiBowl® 1 |
2 |
FlexiBowl® 2 |
FlexiBowl® 2 |
3 |
Cámara 1 |
Cámara 1 |
4 |
Cámara 2 |
Cámara 2 |
5 |
Robot 1 |
Robot 1 |
6 |
VisionController |
Robot 2 |
7 |
— |
VisionController |
8 |
— |
— |
Note
Cableado de los componentes individuales
Los procedimientos de conexión física de cada componente (FlexiBowl®, cámara, tolva, robot) se describen detalladamente en la sección Cableado y conexiones. En una configuración 2FB + 2CAM, simplemente hay que realizar las mismas operaciones dos veces — una para cada estación — con la única diferencia de que cada dispositivo se conecta al Switch en lugar de directamente al VisionController.
Important
Asociación de dispositivos en el software
FlexiVision One puede gestionar todas las estaciones simultáneamente, pero es esencial que la asociación entre los dispositivos esté configurada correctamente en el software. Asegúrese de asociar:
Cámara 1 → FlexiBowl® 1 (+ Tolva 1, si existe)
Cámara 2 → FlexiBowl® 2 (+ Tolva 2, si existe)
Una asociación incorrecta comprometería la localización de las piezas y el buen funcionamiento de todo el sistema.
→ Configuración inicial del sistema