Definición ROI y Tolerancias#
En esta sección se definen las tolerancias de búsqueda de región y de reconocimiento del modelo creado. Estos parámetros determinan dónde y con qué precisión buscará FlexiVision One los componentes durante el funcionamiento.
¿Qué es la búsqueda regional? La Region Search es el área dentro de la cual FlexiVision One buscará y detectará los componentes a recoger.
Procedimiento#
Tras hacer clic en “Siguiente” en la página de formación, se abre automáticamente la página Define Robot Picking Limit Area Model.
Paso 1: Definición del área#
1 |
En la página Define Robot Picking Limit Area Model, modifique el recuadro para delimitar el área de búsqueda |
2 |
Una vez dimensionada correctamente la Region Search, haga clic en |
3 |
Se abrirá la página Locator Model 1 Cam 1 |

Tip
Dimensione el área en función del espacio de trabajo real del robot, evitando las zonas inalcanzables.
Tip
Si tiene alguna duda durante la configuración, consulte el botón INFO de la página actual.
Descripción general de la interfaz del modelo de localización#
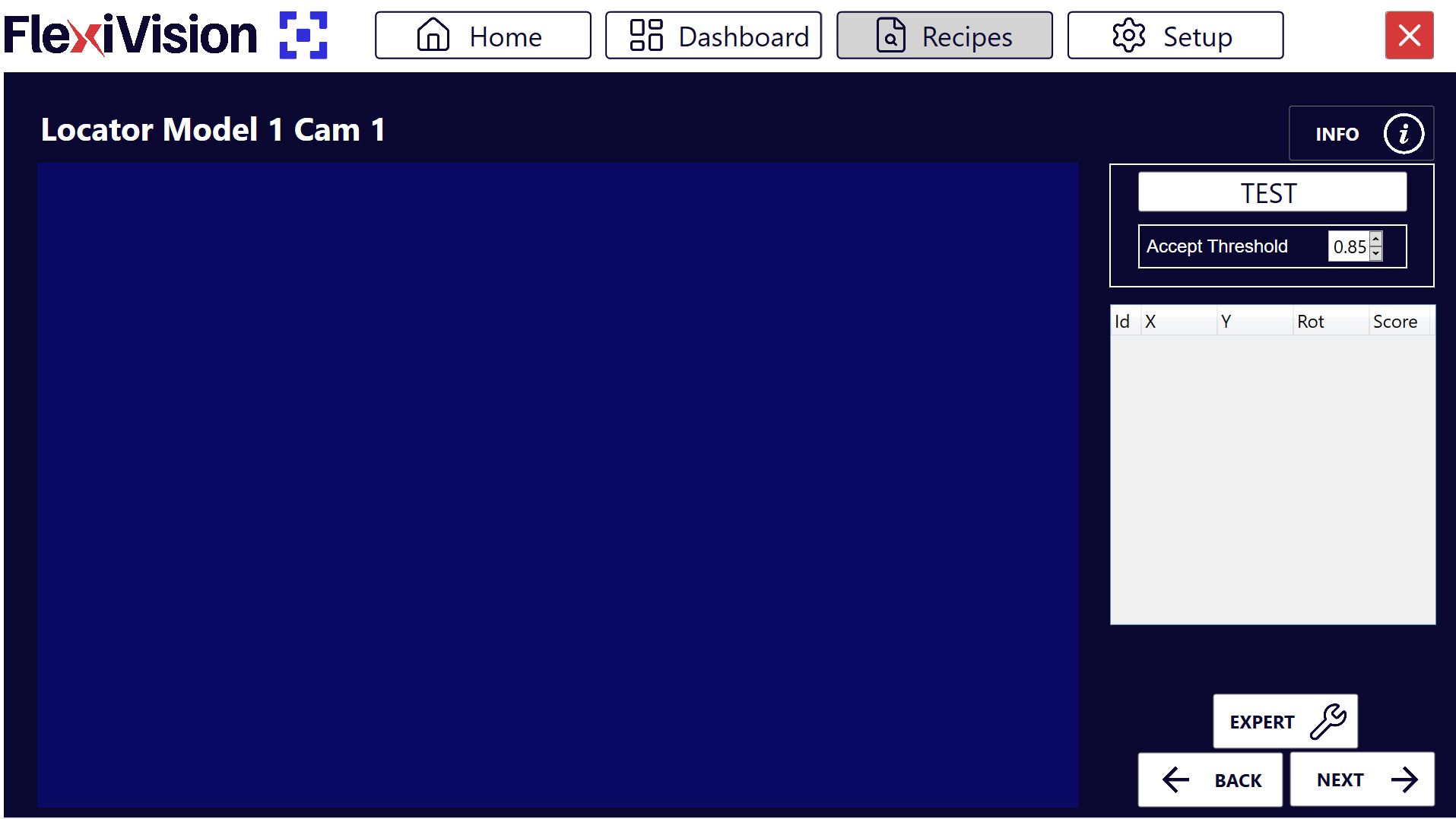
Parámetro |
Descripción |
|---|---|
Test |
Realiza una prueba de reconocimiento en tiempo real con los parámetros actuales |
Accept Threshold |
Umbral mínimo de fidelidad (puntuación) que debe tener un componente para ser aceptado |
Results Panel |
Panel que muestra todos los componentes detectados con detalles (Id, coordenadas, puntuación) |
Tutorial en vídeo#
Tutorial en vídeo que explica los pasos 2 y 3 posteriores:
Paso 2: Preparación de la escena#
4 |
Coloque otros componentes en el área de visualización de forma aleatoria alrededor del componente de referencia para no confundirlos con él. Warning ¡No toque el componente de referencia utilizado para el training! ¡Y no lo pierda de vista! |
Paso 3: Ejecución de la prueba y umbral de aceptación#
5 |
Haga clic en |
6 |
Observe cuántos componentes se detectan y con qué puntuaciones |
7 |
Modifique el Accept Threshold en función de las necesidades de la aplicación Note ¿Qué es el Accept Threshold? Es el grado mínimo de fidelidad (puntuación) que un componente detectado debe tener respecto al modelo de referencia para ser aceptado.
|
 para reconocerlo
para reconocerloTip
Enfoque iterativo recomendado:
Empezar con Umbral de aceptación = 0.85
Realizar pruebas y observar resultados
Si se aceptan demasiadas piezas (incluidos los falsos positivos) → Aumentar el umbral (p. ej.: 0.90)
Si se detectan muy pocas piezas (se descartan piezas buenas) → Disminuir el umbral (p. ej.: 0.80)
Repetir hasta encontrar el valor óptimo para la aplicación
Objetivo: Encontrar el valor más alto posible que detecte todas las piezas buenas pero descarte las peores.
Tip
Si tiene alguna duda durante la configuración, consulte el botón INFO de la página actual.
Resultados de la interpretación#
Visualización de los componentes detectados#
El panel Resultados muestra todos los componentes detectados que cumplen el Umbral de aceptación:
Campo |
Tipo |
Descripción |
|---|---|---|
Id |
Entero |
Identificador único progresivo (0, 1, 2, …) |
X |
Milímetros |
Coordenada X del componente (referencia de origen de la rejilla de calibración) |
Y |
Milímetros |
Coordenada Y del componente (referencia de origen de la rejilla de calibración) |
Rotación |
Grados |
Ángulo de rotación del componente (0-360°) |
Puntuación |
Porcentaje |
Grado de fidelidad respecto al modelo de referencia (0.00-1.00) |
Sistema de prioridad
FlexiVision One por defecto ordena automáticamente todos los componentes reconocidos por puntuación decreciente:
Id 0 → Componente con mayor puntuación (más similar al modelo de referencia)
Id 1 → Segundo mejor componente
Id 2 → Tercer mejor componente
Y así sucesivamente…
Ejemplo de interpretación#
Supongamos que estos resultados aparecen después de la Prueba:
ID |
X |
Y |
Rotación |
Puntuación |
|---|---|---|---|---|
0 |
125.4 |
-45.2 |
15.3° |
0.92 |
1 |
-80.1 |
32.5 |
178.5° |
0.89 |
2 |
45.7 |
110.3 |
92.1° |
0.86 |
3 |
-150.2 |
-95.7 |
45.8° |
0.83 |
Interpretación:
Id 0: La mejor coincidencia (92%), se tomará en primer lugar
Id 1: Buena coincidencia (89%), segunda opción
Id 2: Coincidencia justa (86%), tercera opción
Id 3: Coincidencia aceptable (83%), cuarta opción
Si el umbral de aceptación fuera 0.85:
Id 0, 1, 2 se aceptarían
Id 3 se descartaría (puntuación 0.83 < 0.85)
Finalización#
Paso 4: Limpieza y continuación#
8 |
Retire todos los componentes de la zona, excepto el componente de referencia y los dos objetos situados a sus lados Danger ¡No mueva el componente de referencia! Incluso al limpiar la escena, procure no golpear ni mover el componente de referencia. Sus coordenadas siguen siendo necesarias para la calibración del robot en la fase final. |
9 |
Haga clic en |
See also
Proceda a la Configuración de Clearances para definir las áreas libres.