Creación de recetas y modelos - Visión general#
Esta sección guía al usuario a través del proceso completo de creación de una receta de aplicación y de los modelos de piezas necesarios para el reconocimiento y la recogida por parte del robot.
Note
Requisitos previos
Antes de proceder a la creación de recetas y modelos, asegúrese:
Todas las configuraciones de hardware se han completado (Configuración de componentes)
La calibración de la cámara se ha realizado correctamente (Calibración de la cámara)
La calibración del robot se ha completado
Las piezas físicas que se van a reconocer están disponibles
Receta vs. Modelo: Diferencias fundamentales#
Antes de empezar, es importante entender la diferencia entre Receta y Modelo:
¿Qué es una receta? |
¿Qué es un modelo? |
|---|---|
El contenedor global de toda la aplicación de picking. |
La definición específica de un único componente que debe reconocerse. |
Incluye hasta 8 modelos, parámetros FlexiBowl®, tolvas y lógicas de comunicación. |
Incluye imágenes de entrenamiento, ROI, características visuales, filtros y desplazamientos del robot. |
Gestiona los parámetros de hardware (vibración, velocidad) y de red (puerto TCP/IP, tiempo de espera). |
Gestiona los parámetros de visión (umbral, puntuación mínima) y las coordenadas de recogida (pinza). |
Puede tratar varios tipos de piezas simultáneamente (multimodelo). |
Centrado en un patrón visual específico. |
Tip
Una receta puede contener hasta 8 modelos diferentes, lo que permite al robot reconocer y recoger distintos tipos de piezas de la misma aplicación sin cambiar la configuración.
Resumen completo del proceso#
El proceso de creación de una receta completa y funcional consta de varios pasos secuenciales:
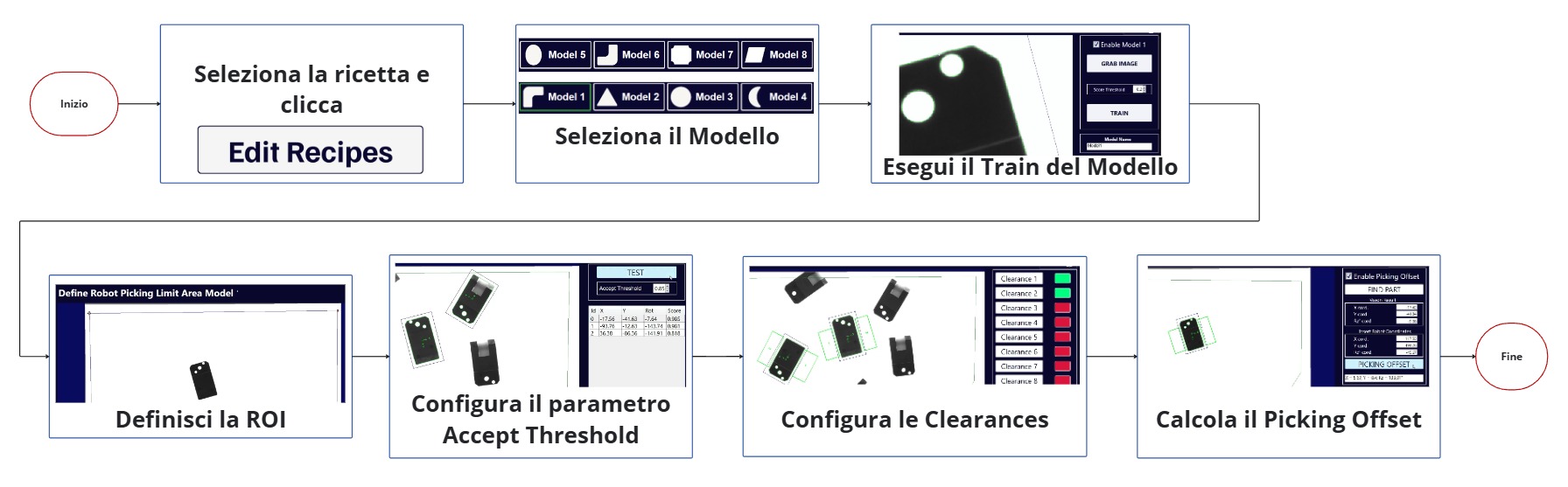
Esquema completo del proceso de creación de recetas y modelos#
Etapas principales#
Paso |
Nombre |
Descripción |
|---|---|---|
1 |
Creación de la receta |
Definición de la receta de aplicación con el nombre, tipo y FlexiBowl® utilizado |
2 |
Preparación física |
Posicionamiento de la pieza de referencia en el área de visión |
3 |
Training del modelo |
Adquisición de la imagen y creación del patrón de reconocimiento |
4 |
Definición del ROI |
Definición del área de búsqueda donde buscar las piezas |
5 |
Ajuste del filtro |
Configuración del umbral de aceptación y tolerancias de reconocimiento |
6 |
Preparación física |
Simulación de picking con robot para posicionar los objetos que simularán la huella de la pinza |
7 |
Memorización de coordenadas |
Memorización de las coordenadas del robot en la posición de picking del componente de referencia |
8 |
Creación de Clearances |
Definición de las zonas que deben permanecer libres (zona de pinza, obstáculos) |
9 |
Coordenadas del robot |
Cálculo del offset de la pinza para un picking correcto |
10 |
Prueba y validación |
Comprobación completa del funcionamiento y guardado de la receta |
Consejos prácticos antes de empezar#
Preparación del material#
Tip
Checklist de preparación
Antes de empezar a crear modelos, prepárese:
Al menos 10-20 piezas del tipo que se desea reconocer (con fines de prueba)
Piezas limpias y en buen estado (representativas de la producción)
Simuladores del tamaño de la pinza (NO deben ser piezas del mismo tipo, ya que es importante no confundirlas con la pieza de referencia.)
Hoja para anotar las coordenadas del robot (X, Y, RZ)
FlexiBowl® vacío y limpio
Backlight/Toplight encendidos
Entorno óptimo#
Note
Condiciones ideales para el training
Iluminación estable (evitar la luz solar directa variable)
FlexiBowl® estacionario
Robot en posición segura (no debe interferir durante las adquisiciones)
Software FlexiVision One abierto y base de recetas cargada
Errores comunes que hay que evitar#
Error
Evitar estos errores frecuentes
❌ No guardar las coordenadas del robot durante la preparación física → imposible calcular el desplazamiento de la pinza
❌ Desplazar la pieza después de guardar las coordenadas → desplazamiento erróneo
❌ Umbral de características demasiado bajo → modelo demasiado detallado, reconoce la textura de la superficie
❌ ROI demasiado estrecha → no se detectan las piezas de los bordes
❌ Clearances demasiado pequeñas → colisiones de la pinza con piezas adyacentes
❌ No realizar pruebas con varias piezas → los problemas no se detectan hasta la producción
Siga cuidadosamente los procedimientos detallados en las siguientes secciones para evitar estos problemas.
Apoyo y recursos adicionales#
Note
Los botones INFO En cada una de las secciones operativas, está disponible un botón INFO en la parte superior derecha. Dentro de este botón está disponible la explicación del procedimiento Step By Step; el mismo procedimiento puede verse en el videotutorial.
Asistencia técnica: support@arsautomation.com para asistencia
Para problemas específicos al crear modelos, consulte Solución de problemas.
Próximos pasos#
Una vez comprendida la visión general del proceso, proceda a la creación propiamente dicha:
→ Comienza: Crear una nueva receta