Las Clearances#
En esta página veremos cómo configurar las Clearances para verificar que las áreas críticas estén libres de obstáculos.
¿Qué es una Clearance?
Una Clearance en FlexiVision One es una herramienta que supervisa un área específica de la imagen para verificar que está despejada. Sirve para comprobar, por ejemplo, que el espacio necesario para que la pinza agarre el componente no está ocupado por otros objetos.
Note
Principio de funcionamiento.
La Clearance analiza los cambios en los niveles de gris en un área definida:
🟢 Verde → Zona libre (OK para la recogida)
🔴 Rojo → Zona ocupada (presencia de obstáculos)
Attention
El uso de las Clearances varía en función de la pieza que se vaya a modelar. Se trata de una evaluación que debe realizar la persona encargada de crear la aplicación.
Paso 1: Configuración física#
Danger
¡Atención! Le mostraremos el procedimiento con la Herramienta Pinza, ya que requiere obligatoriamente la configuración de Clearances para los modelos. Otras herramientas robóticas pueden no necesitar las Clearances para simular la huella.
1 |
Desde la botonera del robot:
|
2 |
Simular un agarre:
|
3 |
Colocar dos objetos a los lados de la pinza para disponer, una vez retirado el robot, de las zonas libres entre el componente de referencia y los dos objetos. Important Deje los objetos ligeramente más separados de lo necesario para evitar errores en la creación del modelo. (margen 2-3 mm) |
4 |
Anotar las coordenadas:
Important ¡Anote estas coordenadas! Serán indispensables en la fase de calibración del robot. |
5 |
Alejar el robot con la botonera sin mover nada en la superficie |
Tip
Si tiene alguna duda durante la configuración, consulte el botón INFO de la página actual.
Paso 2: Acceso a la página Clearance#
6 |
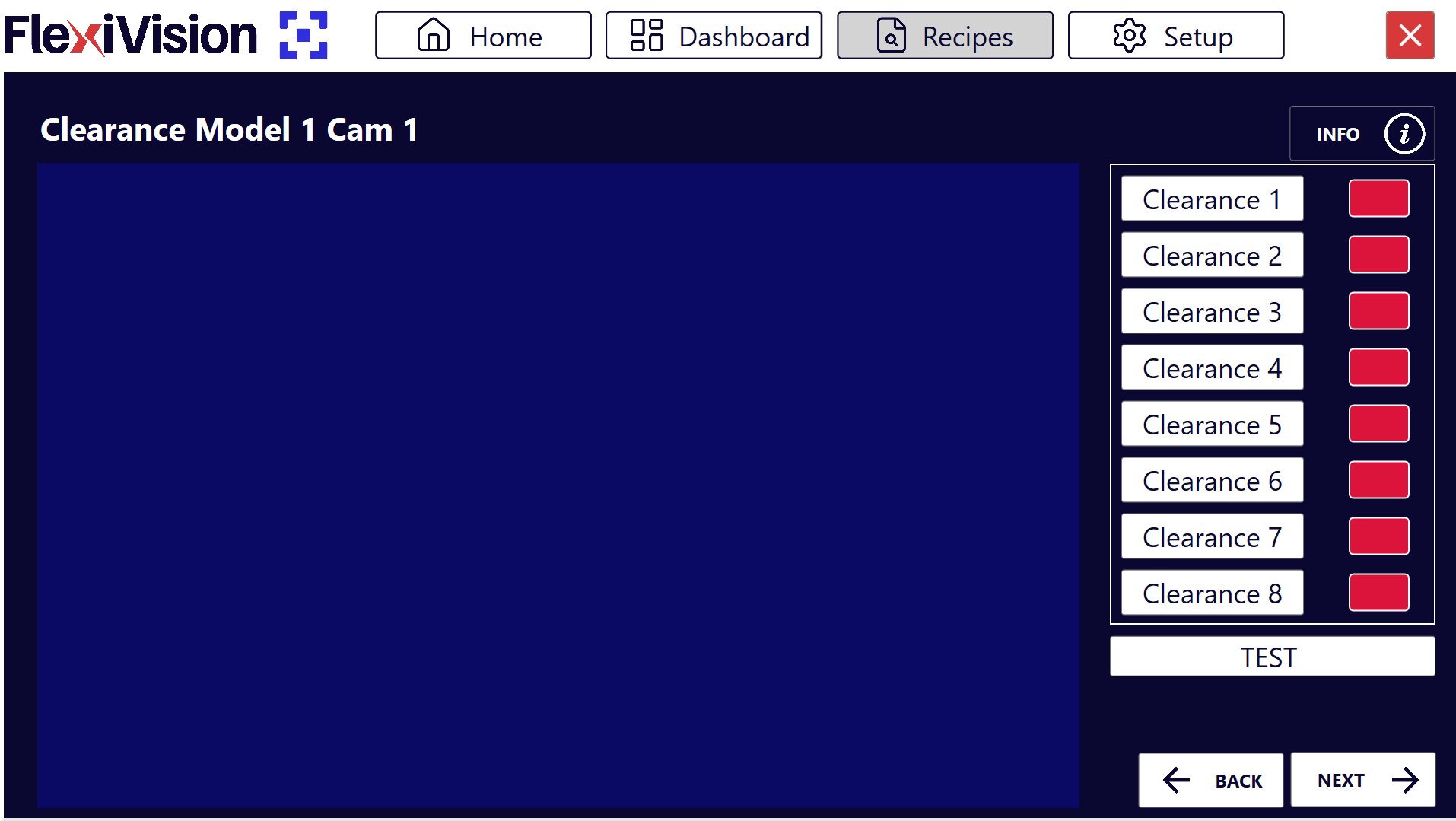
Desde la página Locator Model, tras hacer clic en Next, se abrirá la lista de Clearances disponibles (hasta 8 por modelo). Página Clearances
|
||||||||||||
7 |
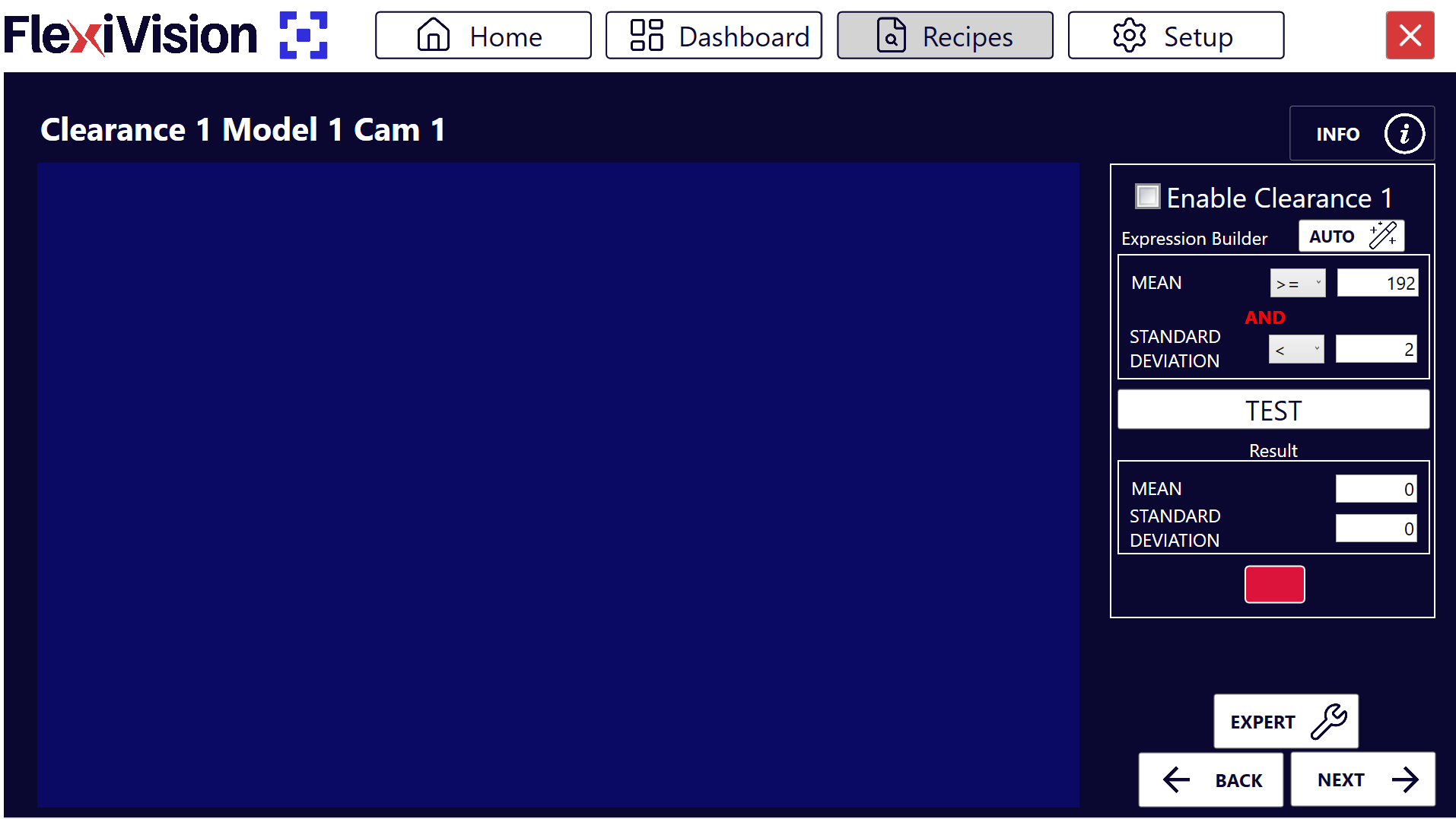
Haga clic en Clearance 1; se abrirá la página de configuración de la primera Clearance “Clearance 1” Página Clearance 1
|
Paso 3: Activación y posicionamiento del área#
8 |
Haga clic en Enable Clearance para activar la Clearance |
9 |
Desplace el cuadro de la Clearance hasta la zona que debe quedar libre
Important Tenga siempre en cuenta estos dos aspectos importantes:
La inobservancia de estos dos puntos podría provocar colisiones del robot que dañarían el FlexiBowl®, los componentes o el propio robot. |
Tip
Si tiene alguna duda durante la configuración, consulte el botón INFO de la página actual.
Paso 4: Configuración automática#
10 |
Haga clic en |
11 |
Haga clic en |
12 |
Compruebe que el recuadro se vuelva verde |
13 |
Haga clic en |
 en Expression Builder
en Expression Builder

Warning
¿Qué hacer si el test falla (recuadro rojo)?
Si después de AUTO el recuadro se vuelve rojo:
Posibles causas:
Realmente hay algo en la zona (pieza, sombra, suciedad)
La iluminación ha cambiado entre la configuración AUTO y TEST
La zona seleccionada incluye bordes del FlexiBowl® o artefactos
Soluciones:
Compruebe visualmente que la zona está completamente despejada
Repita AUTO con condiciones de luz estables
Repita TEST para verificar
Tip
Si tiene alguna duda durante la configuración, consulte el botón INFO de la página actual.
Clearances múltiples — cuándo usarlas#
Cree más Clearances cuando:
La herramienta del robot es una pinza: se necesita una Clearance para cada una de las dos zonas ocupadas por la pinza a cada lado del componente de referencia
Hay varios puntos críticos que controlar
La zona de agarre tiene geometrías especiales
Paso 2-3: Repetición#
Seleccione una nueva Clearance en la página de la lista de Clearances, como “Clearance 2” y repita los pasos 2-3. Repita el procedimiento para cada Clearance necesaria (hasta 8 por modelo).
Paso 4: Prueba global#
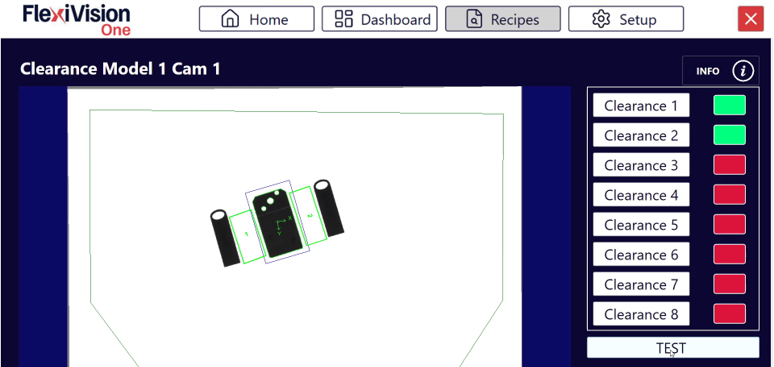
En la página de lista de todas las Clearances, haga clic en TEST para ver todas las Clearances a la vez
 #
#
Interpretación de estados#
Estados de las Clearances#
Color |
Estado |
Significado |
Imagen |
|---|---|---|---|
🟢 Verde |
OK |
Zona libre, recogida posible |
|
🔴 Rojo |
Triggered |
Zona ocupada, recogida no posible |
|
¿Qué significa “Triggered”?#
Una Clearance se vuelve roja (triggered) cuando detecta en su interior:
Presencia de otros componentes
Sombras o reflejos significativos
Cualquier elemento que haga que el área no esté libre
Paso 5: Finalización#
14 |
Después de configurar todas las Clearances necesarias, haga clic en |
15 |
Se abrirá la página Robot Model Pick Cam |
See also
Proceda a la Calibración del robot para completar la configuración.