Configuración del Robot#
Esta sección describe el procedimiento para configurar la comunicación TCP/IP entre el sistema FlexiVision One y el robot industrial. Una comunicación adecuada es esencial para permitir el intercambio de coordenadas y comandos entre los dos sistemas.
Note
Requisitos previos
Antes de continuar, asegúrese de que:
El robot está encendido y operativo
El cable Ethernet entre VisionController y el robot está conectado
El robot está configurado para aceptar conexiones TCP/IP (consulte el manual del robot)
Se conoce el puerto de comunicación configurado en el código del robot
Acceso a la configuración del Robot#
1 |
Desde la página principal del software, hacer clic en |
2 |
En la página SETUP, identificar y hacer clic en el icono Robot Setup Página de configuración
|
3 |
Se abre la página de configuración de la comunicación con el robot |
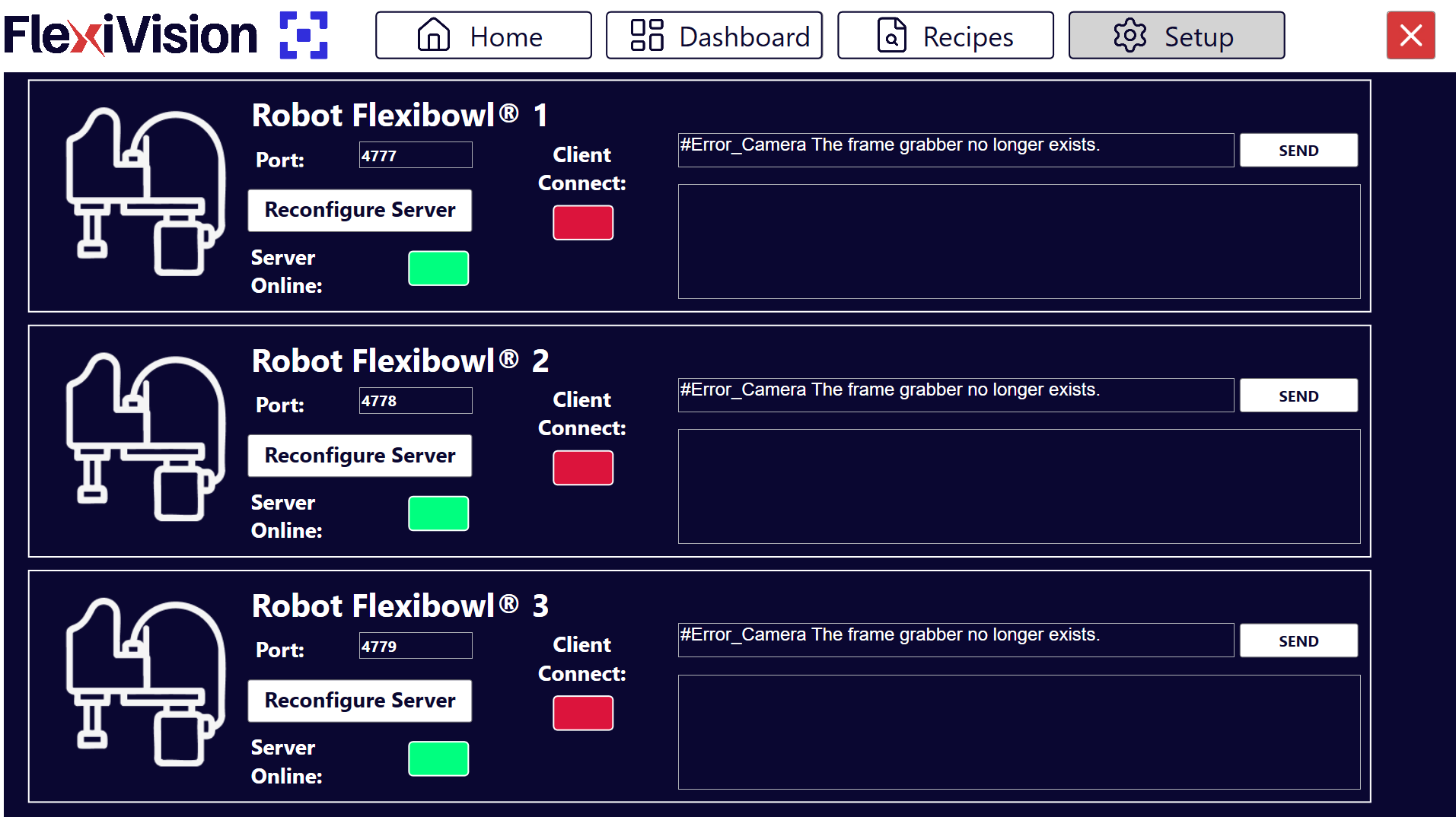
Visión general de la interfaz Robot Setup#
La página Configuración del robot presenta varias secciones para configurar y probar la comunicación:
Sección |
Descripción |
|---|---|
Port |
Puerto TCP/IP con el que el robot comunica (configurado en el controlador del robot) |
Reconfigure Server |
Botón para reconfigurar el servidor de comunicación con nuevos parámetros |
Server Online |
Indicador de estado del servidor FlexiVision One (verde = servidor activo y accesible) |
Client Connect |
Indicador de estado del cliente robot (verde = robot conectado) |
Mensajes robot-flexivision |
Ventanas de registro que muestran los mensajes intercambiados entre el robot y FlexiVision One (utilizadas para depuración):
|
Procedimiento de configuración#
Paso 1: Inserción del puerto de comunicación#
El puerto TCP/IP es el parámetro crítico que debe coincidir entre el robot y FlexiVision One:
4 |
En el campo Port, introducir el número del puerto TCP/IP con el que se comunicará el robot |
Note
Valor predeterminado: (puerto estándar FlexiVision One)
El número de puerto debe ser:
El mismo configurado en el programa del robot
Comprendido entre 1024 y 65535 (puertos de usuario)
Sin conflictos con otros servicios en la red
Warning
Es esencial que el número de puerto sea idéntico en ambos lados:
FlexiVision One: Puerto configurado en esta página
Robot: Puerto configurado en el programa del robot
Si los números no coinciden, la conexión siempre fallará.
Ejemplo:
❌ INCORRECTO: FlexiVision One puerto 2000, Robot puerto 2001 → Sin comunicación
✅ CORRECTO: FlexiVision One puerto 2000, Robot puerto 2000 → Comunicación funcionando
Paso 2: Reconfiguración del servidor#
Después de configurar el puerto correcto, es necesario reiniciar el servidor de comunicación:
5 |
Hacer clic en el botón Reconfigure Server |
6 |
Esperar unos segundos hasta que finalice la reconfiguración |
Note
Es necesario hacer clic en Reconfigure Server cada vez que:
Se modifica el número de puerto
Se desea reiniciar el servidor tras un error
Se ha modificado la configuración de red del VisionController
Se desea forzar el cierre de las conexiones existentes
El servidor se inicia automáticamente al abrir el software FlexiVision One, pero requiere una reconfiguración manual después de realizar cambios.
Paso 3: Verificación del estado del servidor#
Tras la reconfiguración, compruebe que el servidor está activo:
7 |
Observar el indicador Server Online: |
Verde: Servidor activo |
8 |
después de iniciar el programa desde el robot, observar el indicador Client Online: |
Verde: robot conectado |
Note
Si los indicadores están verdes, el sistema está correctamente conectado.
Si uno de los indicadores está rojo, verificar:
Comprobar que el programa en el robot se ha iniciado
Comprobar que las direcciones IP están en la misma subred
Que el puerto no está siendo utilizado por otro programa
Los registros del sistema para mensajes de error
Paso 4: Guardado y finalización#
9 |
Comprobar que la conexión robot → FlexiVision One es estable |
10 |
Los parámetros de comunicación se guardan automáticamente |
11 |
Volver a la página principal SETUP |
Próximos pasos#
Una vez completada la Configuración del Robot, proceda con: