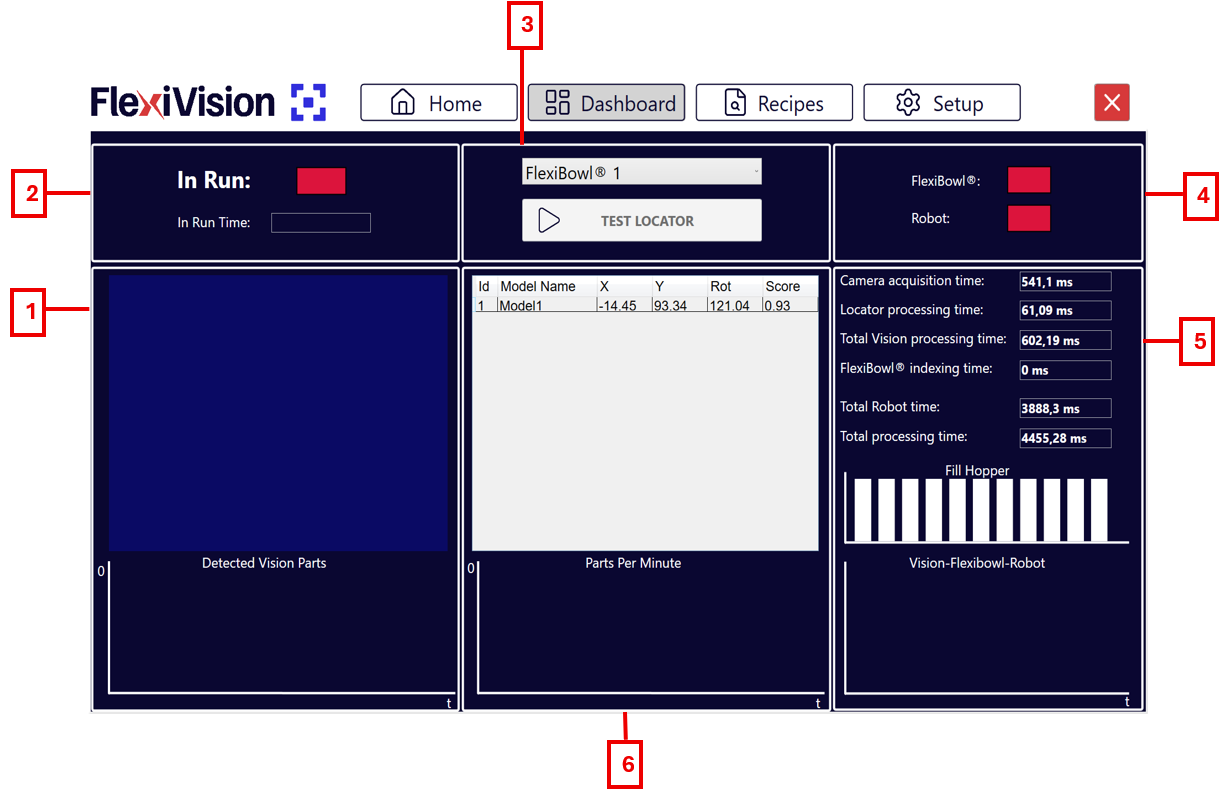
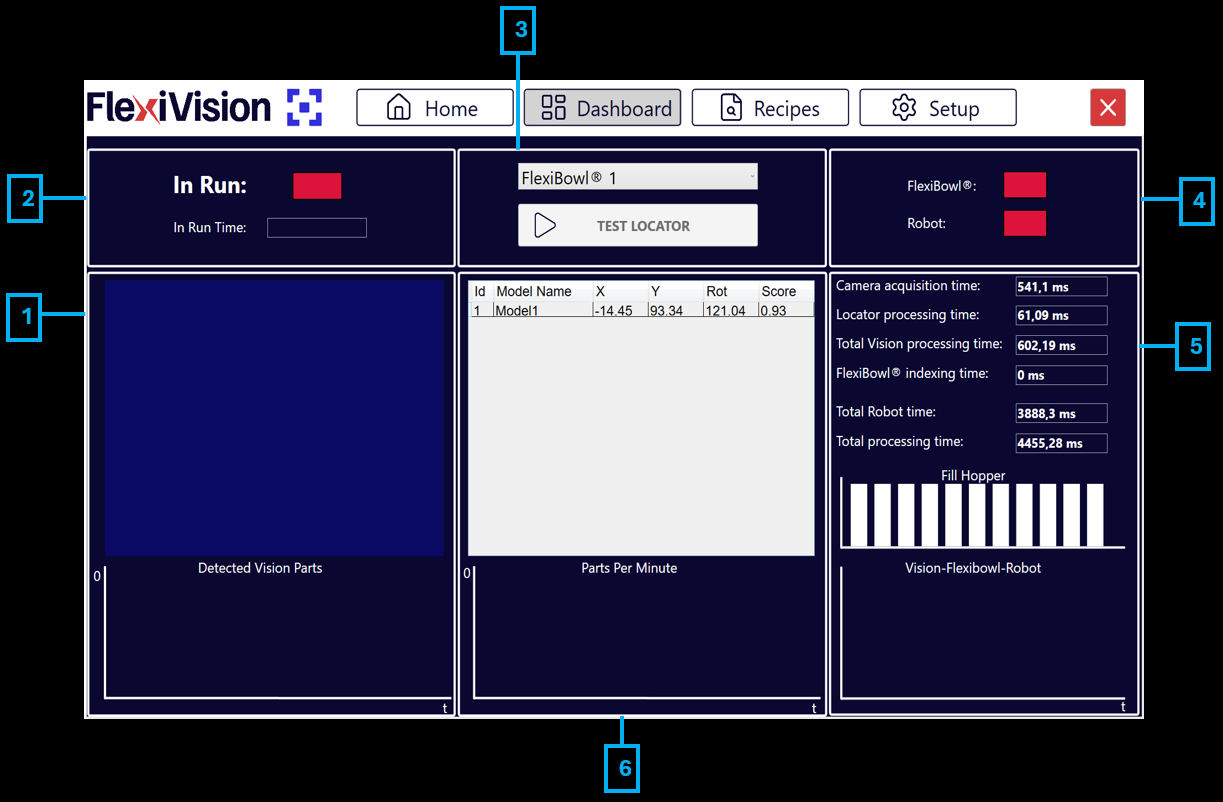
Page Dashboard#
# |
Description |
|---|---|
1 |
Zone de vision et de détection
|
2 |
État de fonctionnement
|
3 |
Contrôles et sélection
|
4 |
État des connexions
|
5 |
Analyse des temps de cycle (Timings)
|
6 |
Graphiques de performance et historique
|
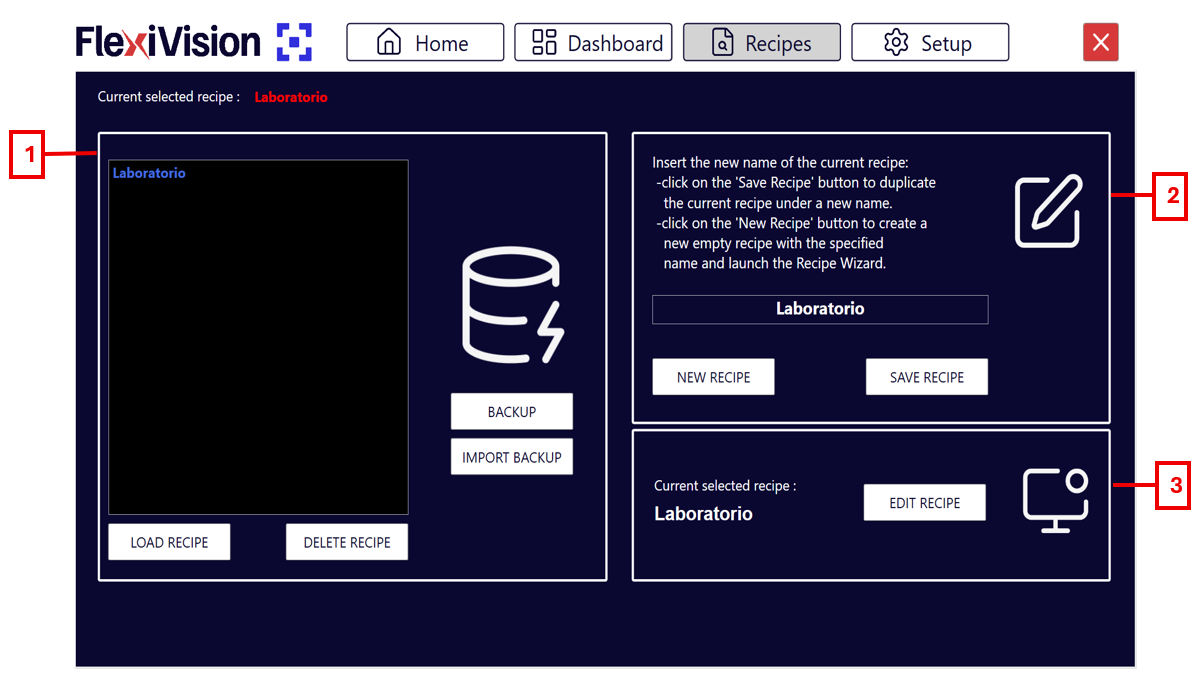
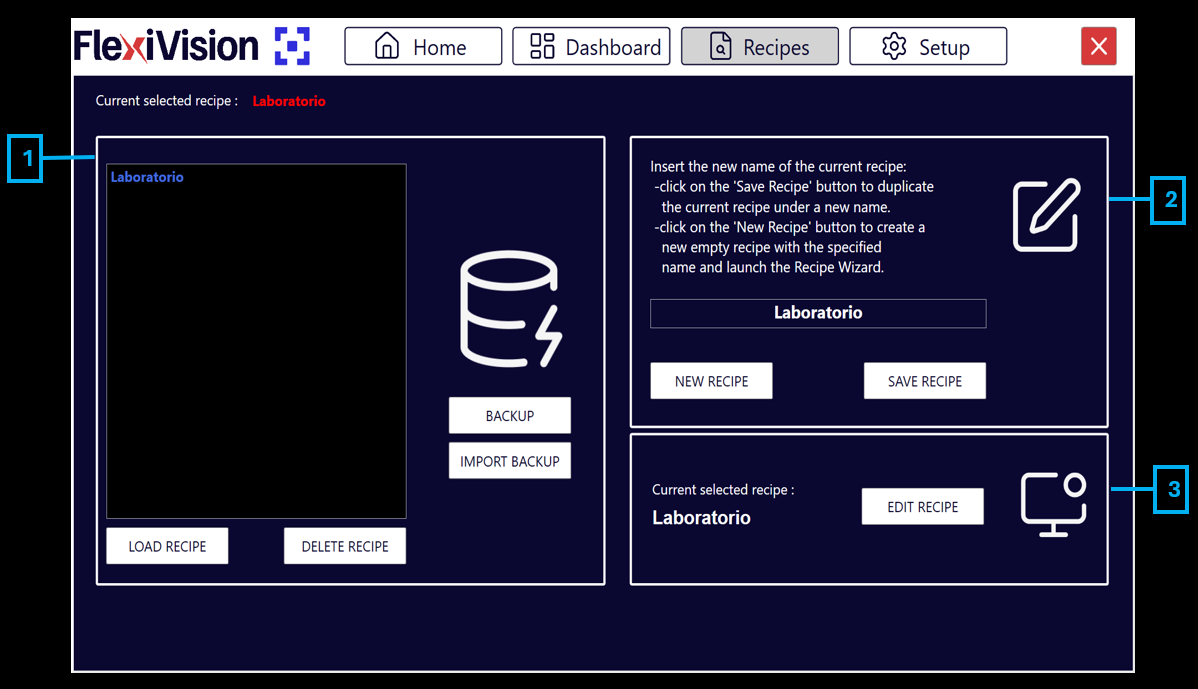
Page Recipes#
# |
Description |
|---|---|
1 |
Gestion de la base de données des recettes
|
2 |
Création et sauvegarde
|
3 |
Modifier la recette
|
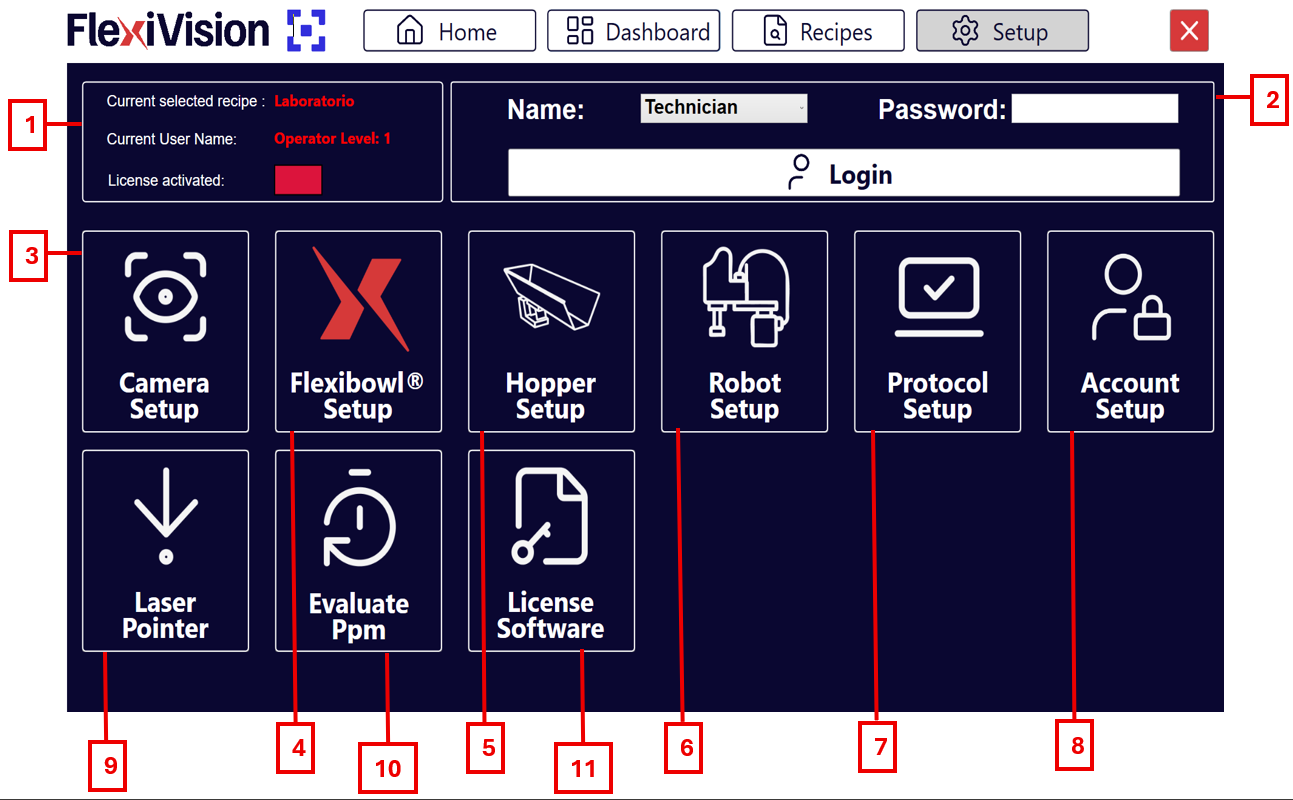
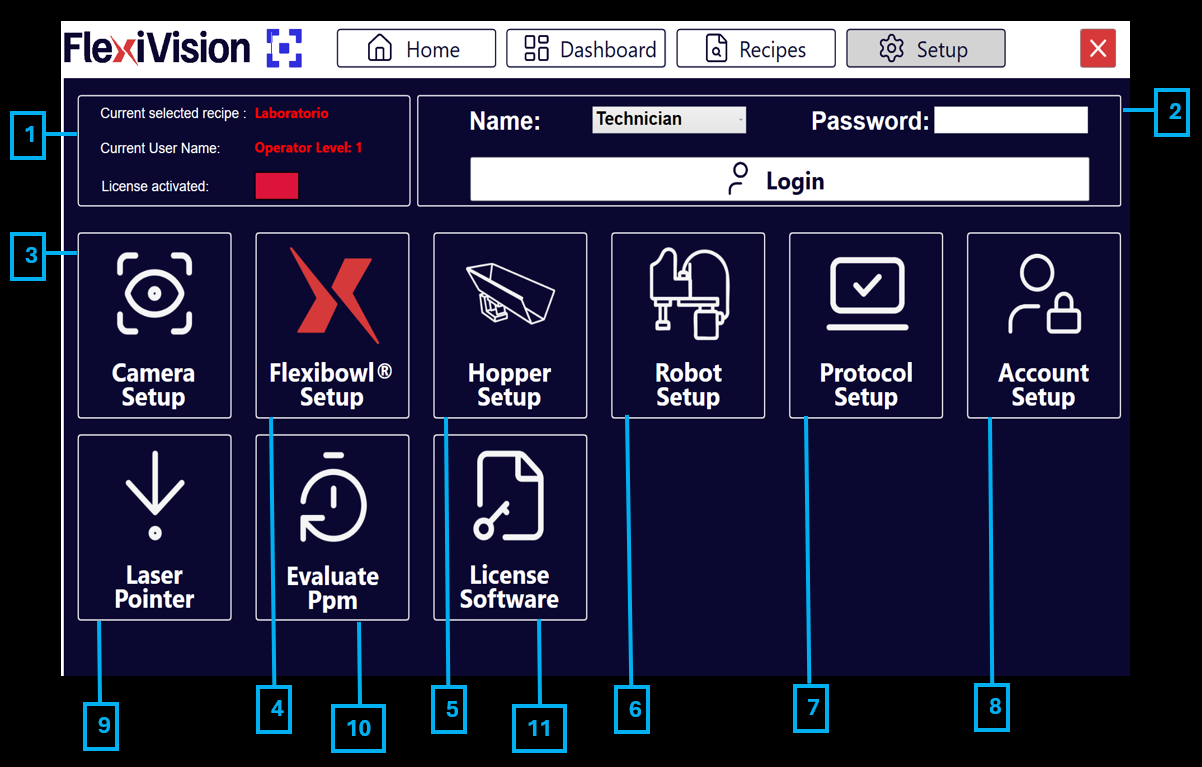
Page Setup#
# |
Description |
|---|---|
1 |
Informations sur l’état
|
2 |
Panneau d’accès
|
3 |
Camera setup : section dédiée à la configuration des paramètres de la caméra. |
4 |
FlexiBowl® setup : espace de réglage des paramètres de mouvement et de contrôle du FlexiBowl®. |
5 |
Hopper setup : configuration des paramètres de la trémie (vibration et déchargement). |
6 |
Robot setup : section permettant de configurer la communication avec le robot. |
7 |
Protocol setup : page de configuration des paramètres définissant le nombre d’objets que la vision doit ou peut renvoyer à chaque cycle, l’ordre de priorité et les valeurs statistiques à utiliser en fonction du nombre de prises du robot et de la durée maximale de manipulation de chaque composant. |
8 |
Account setup : permet de configurer les différents comptes utilisateurs en fonction des niveaux d’accès. |
9 |
Laser pointer : permet d’utiliser un instrument laser pour simuler un prélèvement (pick) en l’absence du robot. |
10 |
Evaluate PPM : permet d’évaluer les pièces par minute (PPM) lors de l’utilisation du pointeur laser. |
11 |
Licence software : page d’activation de la licence logicielle. |
Boutons INFO#
Dans chacune des sections opérationnelles, un bouton INFO est disponible dans le coin supérieur droit. Une explication de la procédure étape par étape est disponible dans ce bouton ; la même procédure peut être vue dans le tutoriel vidéo.