Étalonnage du Robot Pick#
Sur cette page, nous verrons comment relier les coordonnées de la vision à celles du robot pour permettre un prélèvement précis des composants.
Qu’est-ce que le Robot Pick ?
La fonction Robot Pick calcule le décalage entre les coordonnées détectées par FlexiVision One et les coordonnées réelles du robot, ce qui permet au robot de prélever les composants dans la bonne position.
Danger
Coordonnées fondamentales du robot !
Cette étape nécessite OBLIGATOIREMENT les coordonnées X, Y, Rz enregistrées lors de la préparation physique du réglage (étape 1 de la section Clearances).
Sans ces coordonnées, l’étalonnage ne peut être effectué. En cas de perte ou d’oubli, il faudra recommencer toute la préparation physique avec le robot.
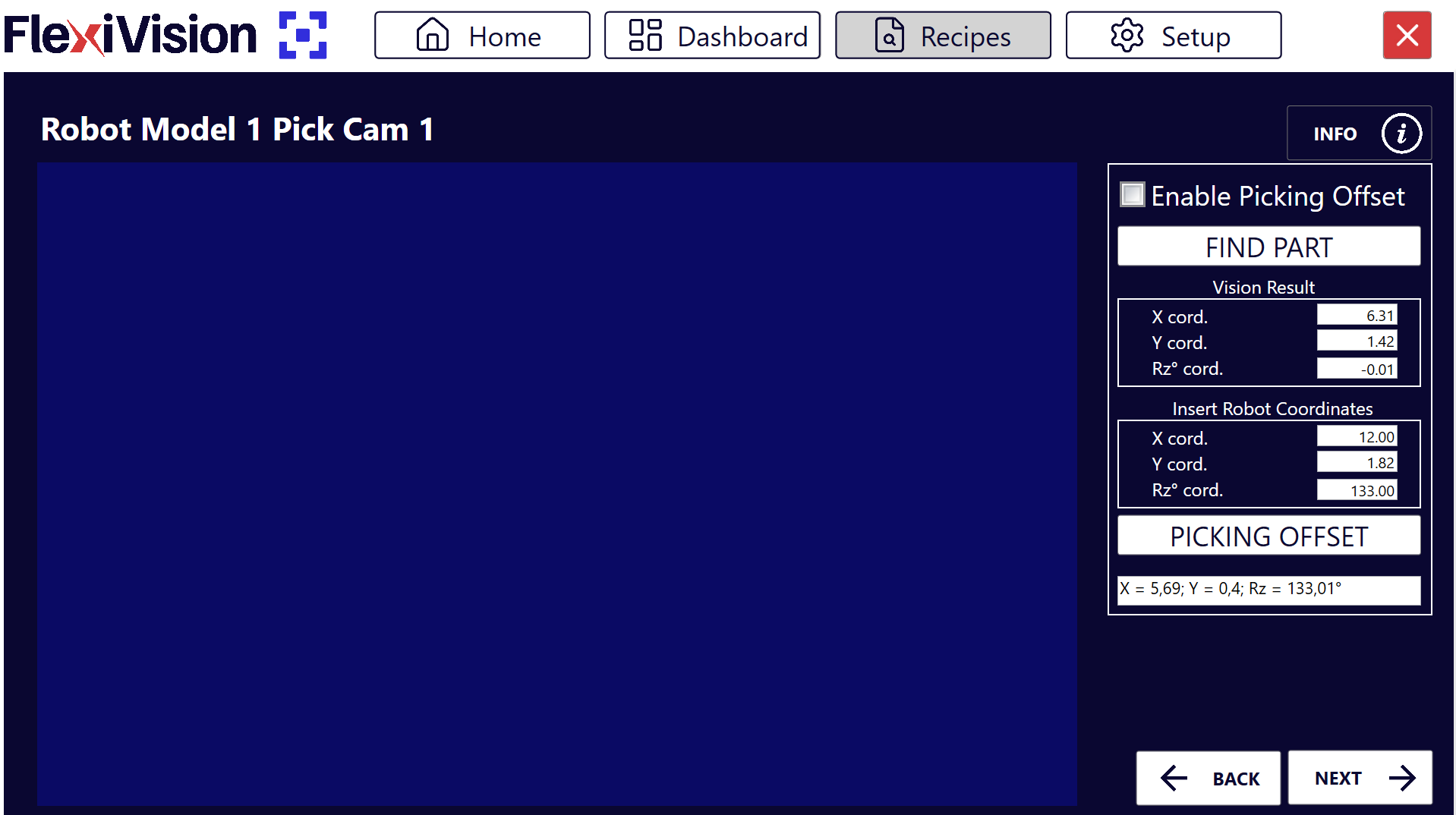
Aperçu de l’interface Robot Pick#
Après avoir cliqué sur « Next » à la page Clearance, la page Robot Model Pick s’ouvre.
Section |
Paramètre |
Fonction |
|---|---|---|
Enable |
Enable Robot Pick |
Active l’étalonnage du robot |
Vision Result |
X cord |
Coordonnée X détectée par la vision |
Vision Result |
Y cord |
Coordonnée Y détectée par la vision |
Vision Result |
RZ cord |
Rotation Z détectée par la vision |
Insert Robot Coordinate |
X cord |
Coordonnées X du robot (à saisir) |
Insert Robot Coordinate |
Y cord |
Coordonnées Y du robot (à saisir) |
Insert Robot Coordinate |
RZ cord |
Rotation Z du robot (à saisir) |
Fonction |
Description |
|---|---|
Find Object |
Détecte le composant et affiche les coordonnées de vision |
Picking Offset |
Calcule le décalage pour un prélèvement correct |
Étape 1 : Activation et détection du composant#
1 |
Cliquer sur Enable Robot Pick |
2 |
Cliquer sur
Note Vision Result: Ce sont les coordonnées que FlexiVision One « voit » dans l’image. Elles ne sont pas encore connectées au système de coordonnées du robot. |
 :
:Tip
En cas de doutes lors de la configuration, veuillez consulter le bouton INFO sur la page en cours.
Étape 2 : Saisie des coordonnées du robot et calcul du décalage#
3 |
Dans la case Insert Robot Coordinates, entrer les coordonnées enregistrées lors de la création du modèle :
Danger Utiliser les coordonnées enregistrées lors de la configuration du modèle. Sans ces coordonnées, l’étalonnage sera incorrect !
Les erreurs commises à ce stade entraînent des décalages complètement erronés du robot, ce qui se traduit par des tentatives de prélèvement dans des positions erronées (même des dizaines de centimètres d’erreur). Le non-respect de ces deux points peut entraîner des collisions avec le robot et endommager le FlexiBowl®, les composants ou le robot lui-même. |
4 |
Cliquer sur
|

Comment fonctionne le Gripper Offset ?
Le système compare :
Coordonnées Vision : là où FlexiVision One « voit » l’origine du composant
Coordonnées Robot : là où le robot a effectivement saisi le composant
Il calcule la différence et l’enregistre en tant que décalage. Ce décalage sera appliqué à tous les composants détectés à l’avenir, afin de garantir que le robot ramasse toujours dans la bonne position.
Tip
En cas de doutes lors de la configuration, veuillez consulter le bouton INFO sur la page en cours.
Étape 3 : Finalisation et sauvegarde#
5 |
En cliquant sur |
6 |
Cliquer sur Sauvegarde complète La sauvegarde comprend :
|
 , retour à la page des recettes
, retour à la page des recettes 
 pour sauvegarder l’ensemble de la configuration
pour sauvegarder l’ensemble de la configurationModèles multiples - Ajouter d’autres modèles#
Étape 4 : Modèles supplémentaires (optionnel)#
7 |
Pour créer des modèles supplémentaires dans la même recette :
Tip Chaque modèle de la recette peut avoir différentes configurations (ROI, clearance, offset), ce qui permet de gérer des composants aux caractéristiques différentes dans la même application. |

See also
Pour tout problème rencontré lors des étapes qui viennent d’être effectuées, consulter Résolution des problèmes