Suivi de l’application : Dashboard#
Le tableau de bord est l’interface principale pour la surveillance en temps réel du système FlexiVision One. Cette page permet de vérifier l’efficacité du processus, d’analyser les temps de cycle, de valider la reconnaissance des composants et d’identifier les éventuels goulets d’étranglement dans le système.
Aperçu de l’interface#
L’interface du tableau de bord est divisée en quatre sections principales :
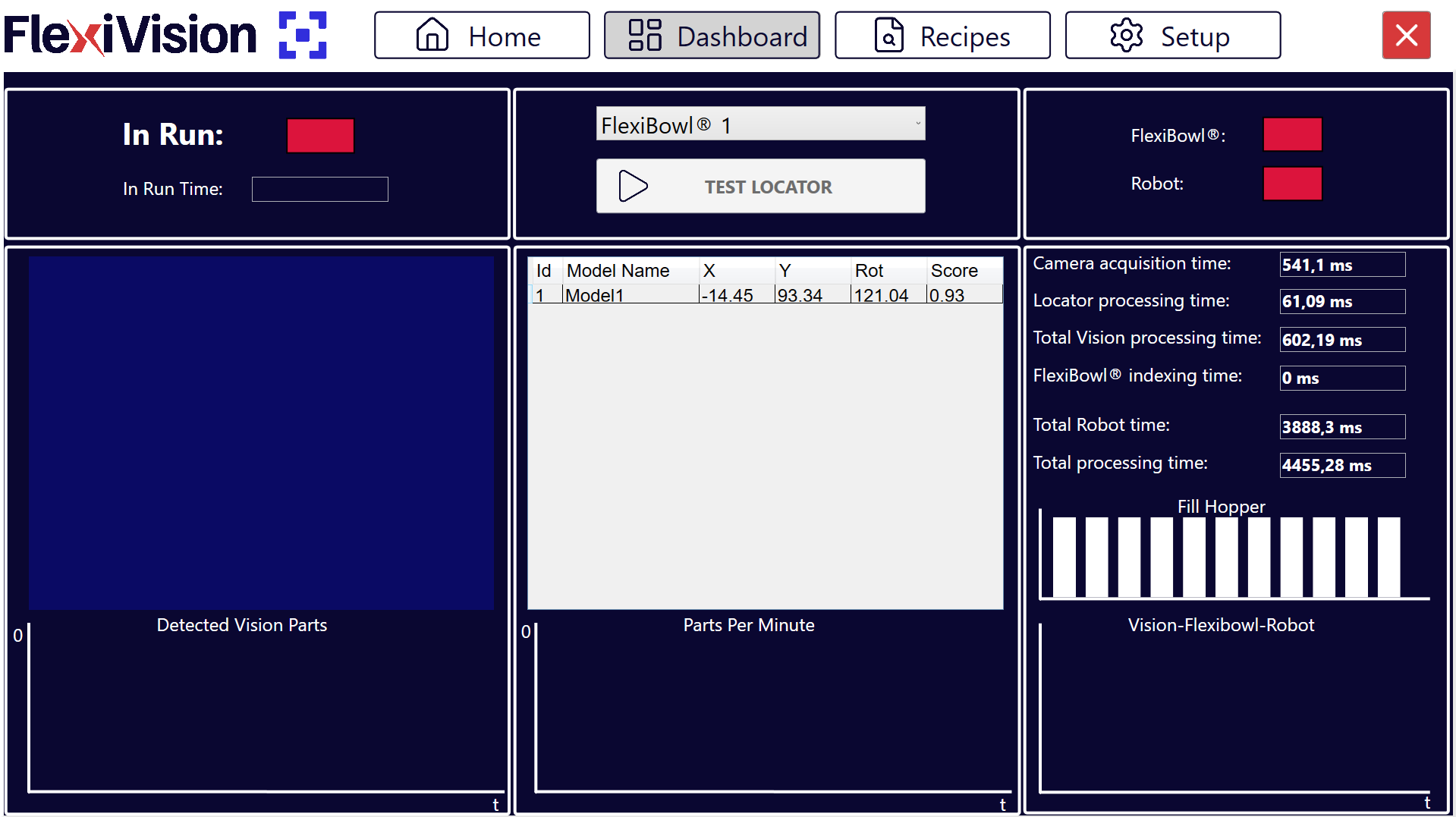
Contrôle opérationnel : Commandes et état d’exécution
Analyse de la vision : Affichage des pièces détectées et des détails
Indicateurs de performance : Connectivité et temps de cycle
Analyse graphique : Graphiques historiques de la productivité et temporels
Contrôle opérationnel - Commandes et état d’exécution#
Élément |
Description et fonction |
|---|---|
In run |
Indicateur d’état indiquant si le système est en cours d’exécution. |
In Run Time |
Affiche la durée totale de fonctionnement du système depuis le démarrage de l’application. |
Sélection FlexiBowl® |
Menu déroulant permettant de sélectionner le FlexiBowl® spécifique à surveiller. |
Test Locator |
Prend une photo de la zone de visualisation et lance la reconnaissance des composants présents. |
Tip
Test Locator Utile pour :
Vérifier que les composants sont bien reconnus par le système de vision
En cas de collision entre le robot et un composant, et si je souhaite vérifier la fiabilité des clearances
Analyse de la vision#
Le centre du tableau de bord présente les données relatives aux composants identifiés par le système de vision.
Detected Vision Parts#
Detected Vision Parts montre les éléments suivants :
Image acquise en temps réel par la caméra
Graphique historique des détections au cours des 30 dernières secondes montrant l’évolution du nombre de pièces reconnues par acquisition.
Tableau des modèles détectés#
Détail des composants reconnus
Le tableau situé sous l’image répertorie tous les composants de la zone de prélèvement avec les paramètres suivants :
Champ |
Type de données |
Description |
|---|---|---|
Id |
Entier |
Identifiant unique du composant progressif (0, 1, 2, …). |
X |
Millimètres |
Coordonnée X du composant. |
Y |
Millimètres |
Coordonnée Y du composant. |
Rot (Rotation) |
Degrés |
Angle de rotation du composant. |
Score |
Pourcentage |
Valeur en pourcentage (0,00-1,00 ou 0 %-100 %) exprimant le degré de fiabilité de la reconnaissance. Il représente la proximité/fidélité au modèle de référence. Score plus élevé = meilleure correspondance. |
Score > 0.90 (90 %) : |
|
Score 0.80-0.90 (80-90 %) : |
|
Score 0.70-0.80 (70-80 %) : |
|
Score < 0.70 (< 70 %) : |
|
Indicateurs de statut et de performance#
Connectivité#
Indicateurs d’état des communications avec des dispositifs externes :
Indicateur |
Description |
|---|---|
FlexiBowl® |
État de la connexion matérielle entre le VisionController (PC) et le FlexiBowl®. |
Robot |
État de la communication avec le robot. |
Warning
Actions à entreprendre en cas de déconnexion
FlexiBowl® rouge :
Vérifier le câble Ethernet FlexiBowl® → VisionController
Vérifier l’alimentation électrique du FlexiBowl®
Vérifier l’IP du FlexiBowl® dans FlexiBowl® Setup
Tenter une reconnexion ou un redémarrage du logiciel
Robot rouge :
Vérifier le câble Ethernet Robot → VisionController
Vérifier que le robot a une connexion TCP/IP ouverte
Vérifier le port TCP/IP dans Robot Setup
Vérifier le programme du robot (l’adresse IP du VisionController et le port ont été correctement introduits dans la section de configuration du robot)
En production, les deux indicateurs doivent toujours être verts.
Analyse des temps#
Le système fournit un breakdown détaillé des temps de cycle afin d’identifier les éventuels goulets d’étranglement et d’optimiser le processus.
Élément temporel |
Description |
|---|---|
Camera Processing Time |
Temps nécessaire à l’acquisition de l’image à partir du capteur de la caméra. Comprend le temps d’exposition et le transfert de données. |
Locator Processing Time |
Temps nécessaire à l’algorithme de vision pour localiser et reconnaître les composants dans l’image acquise. Il dépend du nombre de modèles actifs, de la complexité des modèles et du nombre de clearances. |
Total Vision Processing |
Somme des temps de la caméra et du localisateur. Il représente le temps total nécessaire au système de vision pour traiter une image et envoyer les coordonnées. |
Total FlexiBowl® Time |
Temps nécessaire au FlexiBowl® pour effectuer une séquence complète de manutention. |
Total Robot Time |
Temps estimé ou détecté pour l’opération complète de prélèvement et de placement du robot. Il inclut : rapprochement → prise → levage → dépose → retour. |
Total Processing Time |
Temps de cycle total (Vision + FlexiBowl® + Robot). Il représente le temps écoulé entre le début d’un cycle et le début du suivant. Détermine la productivité maximale théorique (PPM). |
Tip
Interprétation temporelle pour l’optimisation
Le graphique temporel permet d’identifier le goulot d’étranglement du système :
Si Total Vision Processing est le plus élevé :
Trop de modèles actifs → Désactiver les modèles inutiles
Modèles trop complexes → Simplifier avec un Score Threshold plus élevé
Trop de Clearances → Réduire le nombre ou la taille des clearances
Traitement de la caméra élevé → Réduire le temps d’exposition
Si Total FlexiBowl® Time est le plus élevé :
Trop de pauses → Optimiser la synchronisation Flip/Move et réduire la pause de stabilisation (Pause X ms)
Séquence de manutention trop lente → Augmenter la vitesse dans Config FlexiBowl®
Angle de rotation excessif → Réduire le Move Angle
Secousses trop longues → Augmenter la vitesse SHAKE et réduire les cycles SHAKE
Si Total Robot Time est le plus élevé :
Trajectoire du robot non optimisée → Optimiser path planning robot
Vitesse du robot trop faible → Augmenter la vitesse de déplacement (si elle est sûre)
Distance de dépose trop longue → Rapprocher le point de dépose
Temps de préhension trop longs → Optimiser l’ouverture/la fermeture du préhenseur
Objectif d’optimisation : Équilibrer les trois temps pour réduire le Total Processing Time général.
Analyse graphique#
Les graphiques situés en bas du tableau de bord permettent une analyse prédictive et diagnostique des performances du système au fil du temps.
1. Parts Per Minute (PPM)#
Graphique de productivité |
Indique la productivité moyenne du système exprimée en composants prélevés par minute (Parts Per Minute). |
Caractéristiques : |
|
Utilisation : |
|
Tip
PPM constant et stable : |
✓ Système bien configuré |
PPM progressivement décroissant : |
⚠️ Usure possible des composants (surface de préhension du FlexiBowl®) |
PPM avec de fortes fluctuations : |
⚠️ Instabilité du processus |
Mesures correctives : |
|
2. Fill Hopper#
Graphique d’activation de la trémie |
Représente l’historique des impulsions de déchargement envoyées à la trémie (Hopper). |
Caractéristiques : |
|
Utilisation : |
|
Tip
Activations régulières et constantes : |
✓ Configuration optimale de la trémie |
Activations de plus en plus fréquentes : |
⚠️ La trémie se vide (moins de pièces = plus d’activations pour maintenir le niveau) |
Aucune activation depuis longtemps : |
⚠️ Robot arrêté ou ralenti (pièces non consommées) |
Activations très rapprochées (rafales) : |
⚠️ Seuil de trémie mal configuré (trop élevé) |
3. Vision - FlexiBowl® - Robot (Graphique comparatif)#
Graphique des temps superposés |
Un graphique comparatif à trois lignes qui superpose le déroulement des différents processus au fil du temps. |
Utilisation : |
Identifier instantanément le processus qui influe le plus sur le temps de cycle total et comment il varie dans le temps. |
Suivi de la qualité - Indicateurs critiques à surveiller#
Score des composants |
S’assurer que le Score des composants détectés est constamment supérieur au seuil de tolérance (Accept Threshold) défini lors de la configuration du modèle. |
Suivi du score : |
|
Diminution progressive des scores : |
⚠️ Pièces réelles différentes de celles de training (variations de production) |
Actions correctives : |
|
Best Practices en matière de suivi de la production#
Contrôles quotidiens#
Au début de la production (5 minutes) : |
|
Pendant la production (vérification toutes les 1 à 2 heures) : |
|
À la fin du quart de travail (2 minutes) : |
|
Cette routine minimale permet d’identifier rapidement les problèmes et de maintenir la traçabilité des performances.
Report performance#
Tip
Indicateurs clés à suivre Pour évaluer les performances au fil du temps, il convient d’effectuer un suivi :
Tous les jours : |
|
Toutes les semaines : |
|
Tous les mois : |
|
Ces données permettent une optimisation continue et justifient l’investissement dans des améliorations.