2 FlexiBowl® et 2 Caméras#
Cette section décrit les configurations disponibles pour le fonctionnement de deux FlexiBowl® et de deux caméras gérés par un seul VisionController FlexiVision One.
Aperçu de la configuration#
Dans une configuration 2 FlexiBowl® + 2 caméras, le système comprend deux stations d’alimentation et de vision indépendantes, toutes deux contrôlées par le même VisionController. Chaque station est composée des éléments suivants :
1 FlexiBowl®
1 Caméra avec optique dédiée
1 Trémie (optionnelle, si présente)
Les deux stations communiquent avec le VisionController par l’intermédiaire d’un commutateur de réseau.
Important
Le Switch est un composant obligatoire dans toutes les configurations multi-appareils. Sans lui, il n’est pas possible de connecter simultanément plusieurs FlexiBowl® et plusieurs caméras au VisionController. Pour les spécifications techniques et les codes de commande, consultez la section Switch.
Cette configuration permet deux variantes de fonctionnement, en fonction du nombre de robots disponibles dans l’usine :
Variante A |
Variante B |
|
|---|---|---|
Robot |
1 |
2 |
FlexiBowl® |
2 |
2 |
Caméras |
2 |
2 |
Logique de fonctionnement |
Le robot atteint les deux stations |
Chaque robot est dédié à une station |
Commutateur requis |
Oui |
Oui |
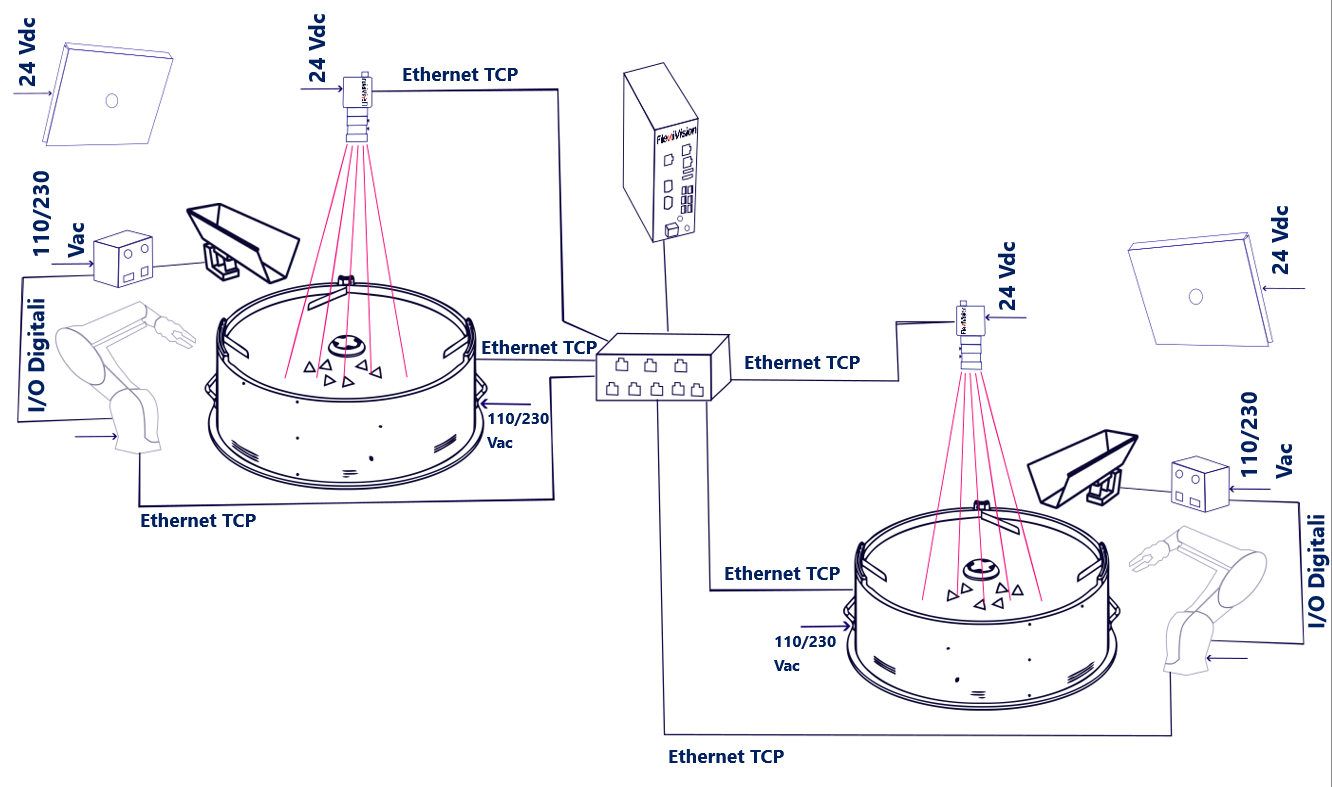
Variante A - 1 Robot, 2 FlexiBowl®#
Dans cette variante, un seul robot opère sur les deux stations. Le robot est positionné de manière à pouvoir atteindre la zone de prélèvement de chaque FlexiBowl®, en alternant le prélèvement entre les deux stations en fonction des commandes reçues.
Chaque station a sa propre recette indépendante. Une application Standard ou Mix peut être configurée sur chaque station, avec différents modèles de composants au sein d’une même recette.
Paramètre |
Valeur |
|---|---|
FlexiBowl® |
2 |
Caméras |
2 |
Robot |
1 |
Commutateur requis |
Oui |
Important
Recette de base et gestion des recettes
Comme pour la configuration simple, dans une configuration 2FB + 2CAM, le processus commence par la création d’une recette de base unique, qui contient la configuration matérielle et l’étalonnage de la caméra pour l’ensemble du système. Cette recette de base est ensuite dupliquée pour chaque station : chaque duplicata constitue la recette de fonctionnement de cette station, à l’intérieur de laquelle les modèles de pièces (jusqu’à 8 par station) sont créés.
Il est donc essentiel que l’association entre les appareils soit configurée correctement dès le départ :
Caméra 1 → FlexiBowl® 1 (+ Trémie 1, si présente)
Caméra 2 → FlexiBowl® 2 (+ Trémie 2, si présente)
Une association incorrecte lors de la configuration affecterait toutes les recettes dérivées, compromettant la reconnaissance des pièces et le bon fonctionnement de l’ensemble du système.
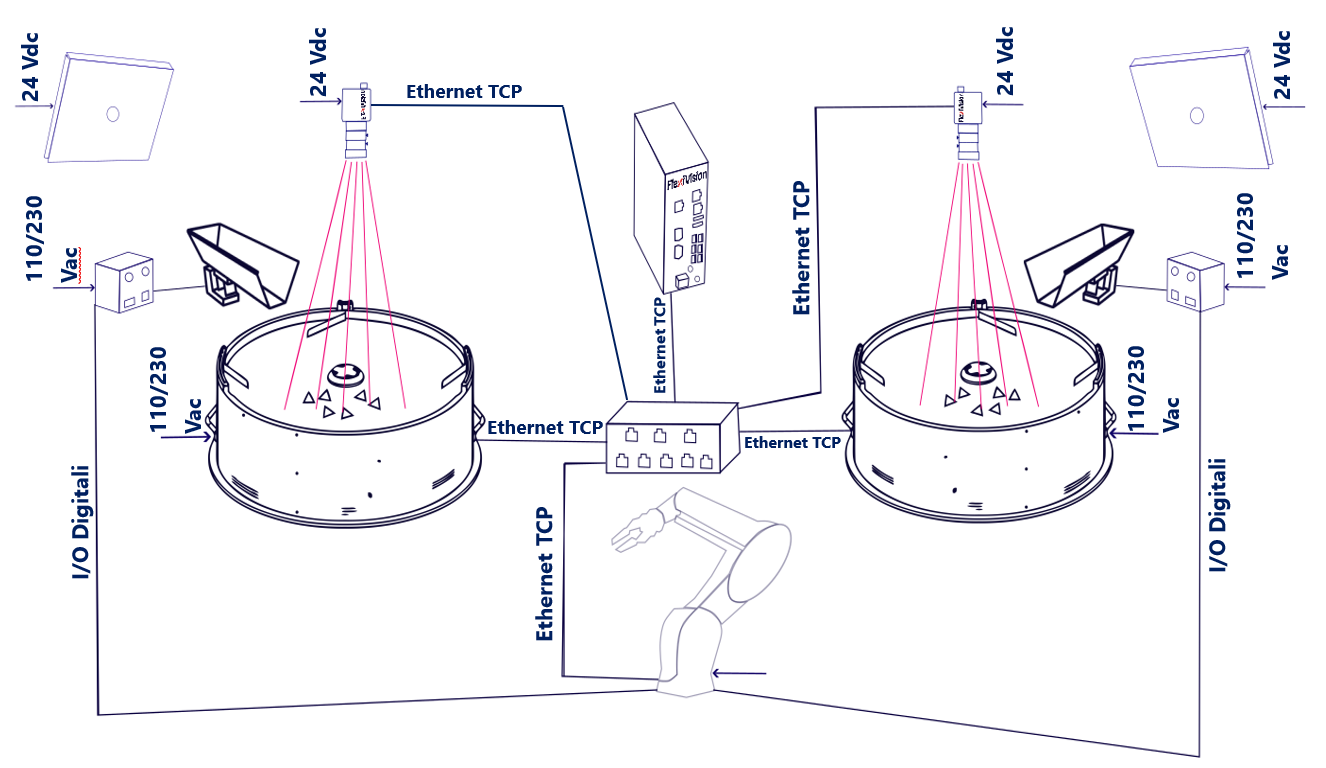
Variante B - 2 Robots, 2 FlexiBowl®#
Dans cette variante, chaque robot est dédié à une seule station : le Robot 1 prélève sur FlexiBowl® 1, le Robot 2 prélève sur FlexiBowl® 2. Les deux cellules sont indépendantes et ne se chevauchent pas.
Dans cette variante également, chaque station prend en charge les applications Standard et Mix.
Paramètre |
Valeur |
|---|---|
FlexiBowl® |
2 |
Caméras |
2 |
Robot |
2 |
Commutateur requis |
Oui |
Tip
Cette variante garantit une productivité maximale, les deux cellules fonctionnant en parallèle et de manière totalement autonome.
Important
Recette de base et gestion des recettes
Comme pour la configuration simple, dans une configuration 2FB + 2CAM, le processus commence par la création d’une recette de base unique, qui contient la configuration matérielle et l’étalonnage de la caméra pour l’ensemble du système. Cette recette de base est ensuite dupliquée pour chaque station : chaque duplicata constitue la recette de fonctionnement de cette station, à l’intérieur de laquelle les modèles de pièces (jusqu’à 8 par station) sont créés.
Il est donc essentiel que l’association entre les appareils soit configurée correctement dès le départ :
Caméra 1 → FlexiBowl® 1 (+ Trémie 1, si présente)
Caméra 2 → FlexiBowl® 2 (+ Trémie 2, si présente)
Une association incorrecte lors de la configuration affecterait toutes les recettes dérivées, compromettant la reconnaissance des pièces et le bon fonctionnement de l’ensemble du système.
Composants nécessaires#
Kit de base FlexiVision One#
Le kit de base FlexiVision One (fourni avec le système) comprend déjà tout ce qui est nécessaire pour la première station (caméra, optique, câbles, grille d’étalonnage). Il n’est pas nécessaire d’acheter un deuxième kit complet pour la deuxième station.
Kit de caméra supplémentaire#
Pour la deuxième station, il suffit d’acheter le kit de caméra supplémentaire, qui est disponible dans une version spécifique pour chaque taille de FlexiBowl®. Le kit comprend :
1 Caméra
1 Optique dédiée à la taille FlexiBowl®
1 Grille d’étalonnage
1 Câble d’alimentation de la caméra
2 Câbles Ethernet
Sélectionner le kit en fonction de la taille du deuxième FlexiBowl® :
Taille FlexiBowl® |
Code Kit de caméra supplémentaire |
Optique incluse |
|---|---|---|
FB 200 |
GM002002 |
CE000881 - FlexiVision One 35mm Optique |
FB 350 |
GM002003 |
CE000881 - FlexiVision One 35mm Optique |
FB 500 |
GM002004 |
CE000880 - FlexiVision One 25mm Optique |
FB 650 |
GM002005 |
CE000879 - FlexiVision One 16mm Optique |
FB 800 |
GM002006 |
CE000879 - FlexiVision One 16mm Optique |
FB 1200 |
GM002007 |
CE000878 - FlexiVision One 12mm Optique |
Note
Si les deux stations utilisent des FlexiBowl® de tailles différentes, le kit de caméra supplémentaire doit être sélectionné en fonction de la taille du FlexiBowl® de la deuxième station. La première station est déjà couverte par le kit de base.
Switch#
Le Switch est toujours nécessaire dans les configurations multi-appareils. Pour le code, les spécifications électriques et physiques, voir la section dédiée :
→ Switch
Câblage#
Le schéma de câblage est identique pour les deux variantes : tous les appareils de terrain (FlexiBowl®, caméras, robots) se connectent au Switch, et le Switch se connecte au VisionController via un seul port Ethernet. La différence entre la variante A et la variante B concerne uniquement le nombre de robots connectés au Switch.
Important
Le Switch dispose de 8 ports Ethernet. Vérifier que le nombre total d’appareils à connecter ne dépasse pas la capacité disponible, en tenant compte de tous les FlexiBowl®, caméras et robots présents.
Schéma de connexion#
Appareil |
Connexion |
|---|---|
FlexiBowl® 1 |
Port Ethernet → Switch |
FlexiBowl® 2 |
Port Ethernet → Switch |
Caméra 1 |
Câble Ethernet → Switch |
Caméra 2 |
Câble Ethernet → Switch |
Robot 1 |
Port Ethernet → Switch |
Robot 2 (Variante B uniquement) |
Port Ethernet → Switch |
Switch |
Port Ethernet → VisionController |
Tip
Veiller à ce qu’une adresse IP unique soit attribuée à chaque appareil dans le même sous-réseau. Les ports TCP/IP utilisés par le VisionController pour les deux stations sont configurables : par défaut FB1 → 4001, FB2 → 4002. Voir la section Protocole de communication Robot-Vision pour plus de détails.
Ports Switch occupés par variante#
Port Switch |
Variante A (1 Robot) |
Variante B (2 Robots) |
|---|---|---|
1 |
FlexiBowl® 1 |
FlexiBowl® 1 |
2 |
FlexiBowl® 2 |
FlexiBowl® 2 |
3 |
Caméra 1 |
Caméra 1 |
4 |
Caméra 2 |
Caméra 2 |
5 |
Robot 1 |
Robot 1 |
6 |
VisionController |
Robot 2 |
7 |
- |
VisionController |
8 |
- |
- |
Note
Câblage des composants individuels
Les procédures de branchement physique de chaque composant (FlexiBowl®, caméra, trémie, robot) sont décrites en détail dans la section Câblage et connexions. Dans une configuration 2FB + 2CAM, il suffit d’effectuer deux fois les mêmes opérations - une fois pour chaque station - à la seule différence que chaque appareil se connecte au Switch plutôt que directement au VisionController.
Important
Association de dispositifs dans le logiciel
FlexiVision One peut gérer toutes les stations simultanément, mais il est indispensable que l’association entre les appareils soit correctement configurée dans le logiciel. Veiller à associer :
Caméra 1 → FlexiBowl® 1 (+ Trémie 1, si présente)
Caméra 2 → FlexiBowl® 2 (+ Trémie 2, si présente)
Une association incorrecte compromettrait l’emplacement des pièces et le bon fonctionnement de l’ensemble du système.
→ Configuration initiale du système