Robot Setup#
Cette section décrit la procédure de configuration de la communication TCP/IP entre le système FlexiVision One et le robot industriel. Une communication adéquate est essentielle pour permettre l’échange de coordonnées et de commandes entre les deux systèmes.
Note
Pré-requis
Avant de poursuivre, s’assurer que :
Le robot est allumé et opérationnel
Le câble Ethernet entre le VisionController et le robot est connecté
Le robot est configuré pour accepter les connexions TCP/IP (voir le manuel du robot)
Le port de communication configuré dans le code du robot est connu
Accès à la configuration du robot#
1 |
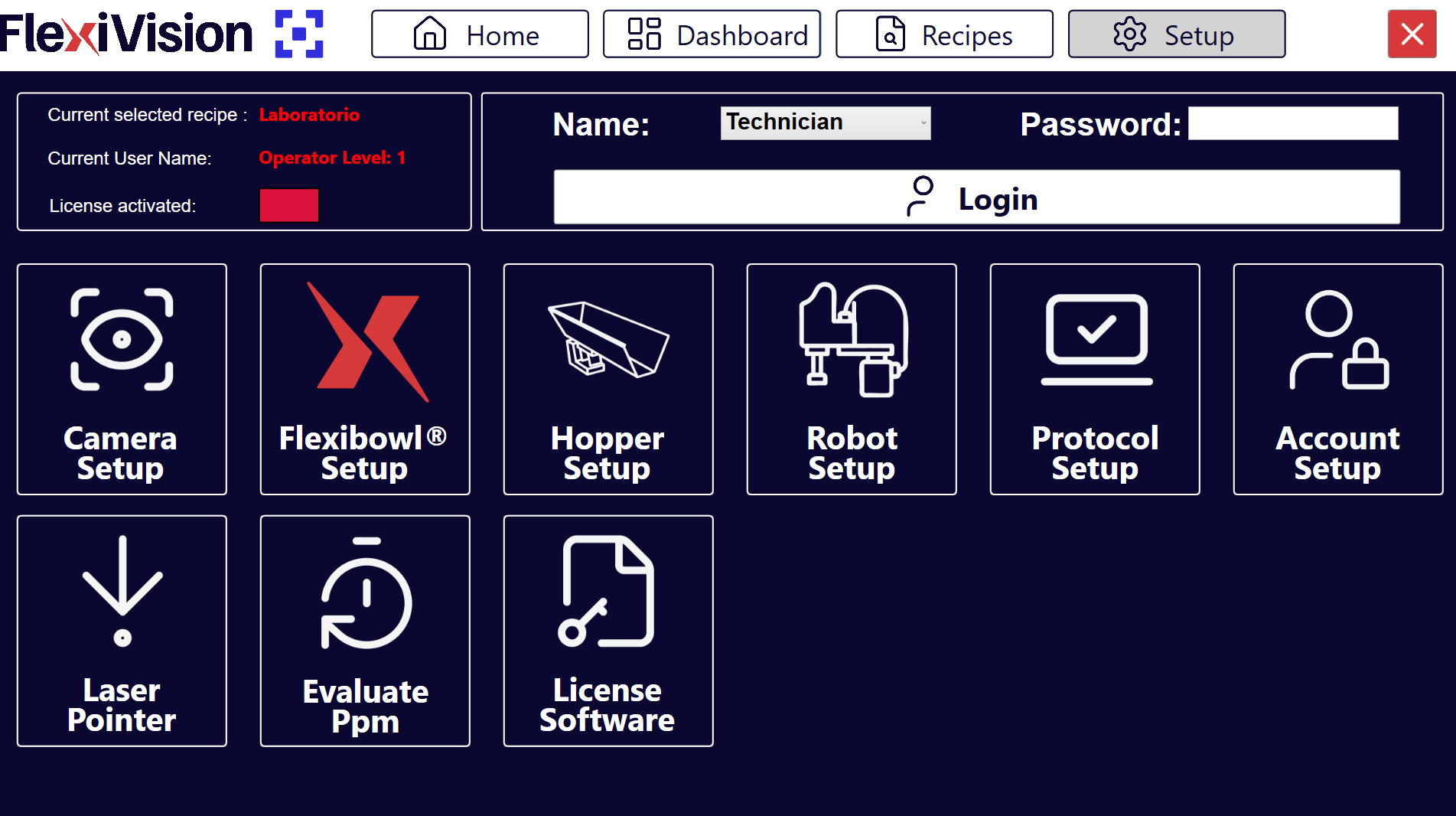
Depuis la page principale du logiciel, cliquer sur |
2 |
Sur la page SETUP, identifier et cliquer sur l’icône Robot Setup Page Setup
|
3 |
La page de configuration de la communication avec le robot s’ouvre |
Aperçu de l’interface Robot Setup#
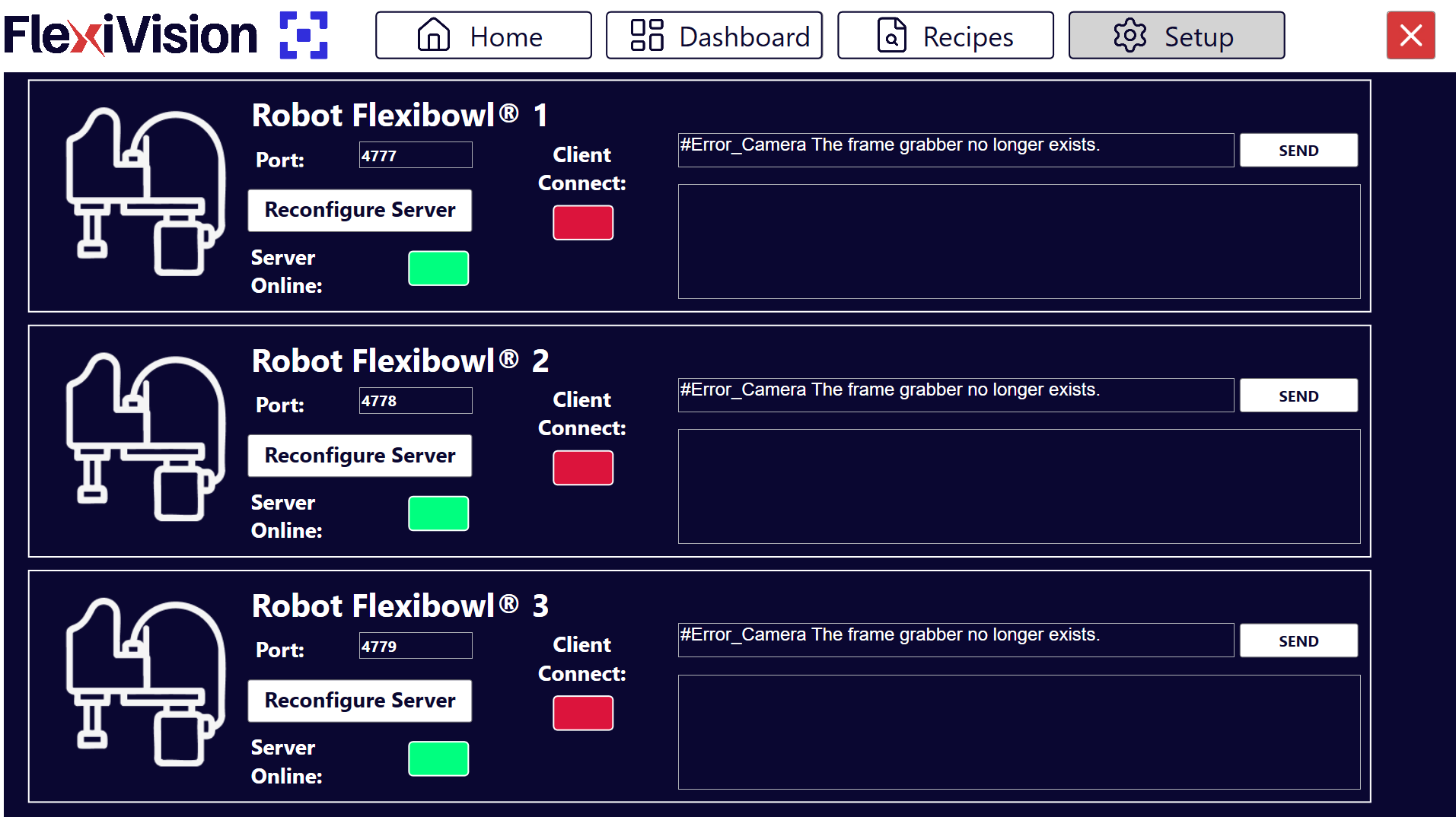
La page Robot Setup présente plusieurs sections permettant de configurer et de tester la communication :
Section |
Description |
|---|---|
Port |
Port TCP/IP avec lequel le robot communique (configuré sur le contrôleur du robot) |
Reconfigure Server |
Bouton permettant de reconfigurer le serveur de communication avec de nouveaux paramètres |
Server Online |
Indicateur d’état du serveur FlexiVision One (vert = serveur actif et accessible) |
Client Connect |
Indicateur d’état du client du robot (vert = robot connecté) |
Messages Robot-Flexivision |
Fenêtres de logs montrant les messages échangés entre le robot et FlexiVision One (utilisées pour le débogage) :
|
Procédure de configuration#
Étape 1 : Insertion du port de communication#
Le port TCP/IP est le paramètre critique qui doit correspondre entre le robot et le FlexiVision One :
4 |
Dans le champ Port, saisir le numéro du port TCP/IP avec lequel le robot va communiquer |
Note
Valeur définie : (Port standard FlexiVision One) Le numéro de port doit être :
Identique à la configuration du programme du robot
Entre 1024 et 65535 (ports utilisateur)
Pas en conflit avec les autres services du réseau
Warning
Il est essentiel que le numéro du port soit identique des deux côtés :
FlexiVision One : Port configuré sur cette page
Robot : Port configuré dans le programme du robot
Si les numéros ne correspondent pas, la connexion échouera toujours.
Exemple :
❌ ERRONÉ : FlexiVision One port 2000, Robot port 2001 → Aucune communication
✅ CORRECT : FlexiVision One port 2000, Robot port 2000 → Communication en état de fonctionnement
Étape 2 : Reconfiguration du serveur#
Après avoir défini le port correct, le serveur de communication doit être redémarré :
5 |
Cliquer sur le bouton Reconfigure Serveur |
6 |
Veuillez patienter quelques secondes le temps que la reconfiguration se termine. |
Note
Il faut cliquer sur Reconfigure Server à chaque fois que :
Vous changez le numéro de port
Vous voulez redémarrer le serveur après une erreur
Vous avez changé la configuration réseau du VisionController
Vous voulez forcer l’arrêt des connexions existantes.
Le serveur démarre automatiquement à l’ouverture du logiciel FlexiVision One, mais nécessite une reconfiguration manuelle après des changements.
Étape 3 : Vérification de l’état du serveur#
Après la reconfiguration, vérifier que le serveur est actif :
7 |
Observer l’indicateur Server Online : |
Vert : Serveur actif |
8 |
après avoir lancé le programme à partir du robot, observer l’indicateur Client Online : |
Vert : robot connecté |
Note
Si les voyants sont verts, le système est correctement connecté.
Si l’un des indicateurs est rouge, vérifier :
Vérifier que le programme sur le robot a été démarré
Vérifier que les adresses IP sont sur le même sous-réseau
Que le port ne soit pas déjà utilisé par un autre programme
Les journaux du système pour les messages d’erreur
Étape 4 : Sauvegarde et achèvement#
9 |
Vérifier que la connexion robot → FlexiVision One est stable. |
10 |
Les paramètres de communication sont automatiquement sauvegardés. |
11 |
Revenir à la page principale de SETUP |
Prochaines étapes#
Une fois la configuration du robot terminée, passer à l’étape suivante :