Les Clearances#
Sur cette page, nous verrons comment configurer les Clearances pour vérifier que les zones critiques sont exemptes d’obstacles.
Qu’est-ce qu’une Clearance ?
Une Clearance dans FlexiVision One est un outil qui contrôle une zone spécifique de l’image pour vérifier qu’elle est libre. Il permet de vérifier, par exemple, que l’espace nécessaire à la pince pour saisir le composant n’est pas occupé par d’autres objets.
Note
Principe de fonctionnement.
La clearance analyse les variations des niveaux de gris dans une zone définie :
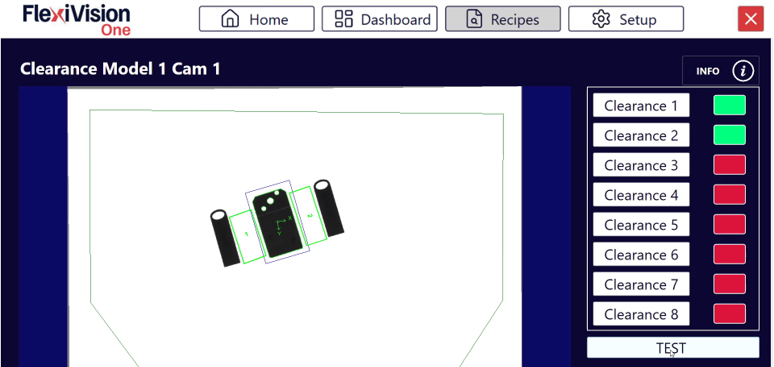
🟢 Vert → Zone libre (OK pour le prélèvement)
🔴 Rouge → Zone occupée (présence d’obstacles)
Attention
L’utilisation des Clearances varie en fonction de la pièce à modéliser. Il s’agit d’une évaluation à effectuer par la personne chargée de créer l’application.
Étape 1 : Configuration physique#
Danger
Attention ! Nous allons vous montrer la procédure avec l’outil Pince car il nécessite obligatoirement la configuration de Clearances pour les modèles. D’autres outils pour le robot peuvent ne pas avoir besoin de ces Clearances pour simuler l’empreinte.
1 |
Sur le pupitre d’apprentissage du robot :
|
2 |
Simuler une prise :
|
3 |
Placer deux objets sur les côtés de la pince pour disposer, une fois le robot retiré, des zones libres entre le composant de référence et les deux objets. Important Laisser les objets légèrement plus espacés que nécessaire pour éviter les erreurs lors de la création du modèle. (marge de 2-3 mm) |
4 |
Noter les coordonnées :
Important Noter ces coordonnées ! Elles seront indispensables lors de l’étalonnage du robot. |
5 |
Éloigner le robot avec le pupitre sans déplacer quoi que ce soit sur la surface |
Tip
En cas de doutes lors de la configuration, veuillez consulter le bouton INFO sur la page en cours.
Étape 2 : Accès à la page Clearance#
6 |
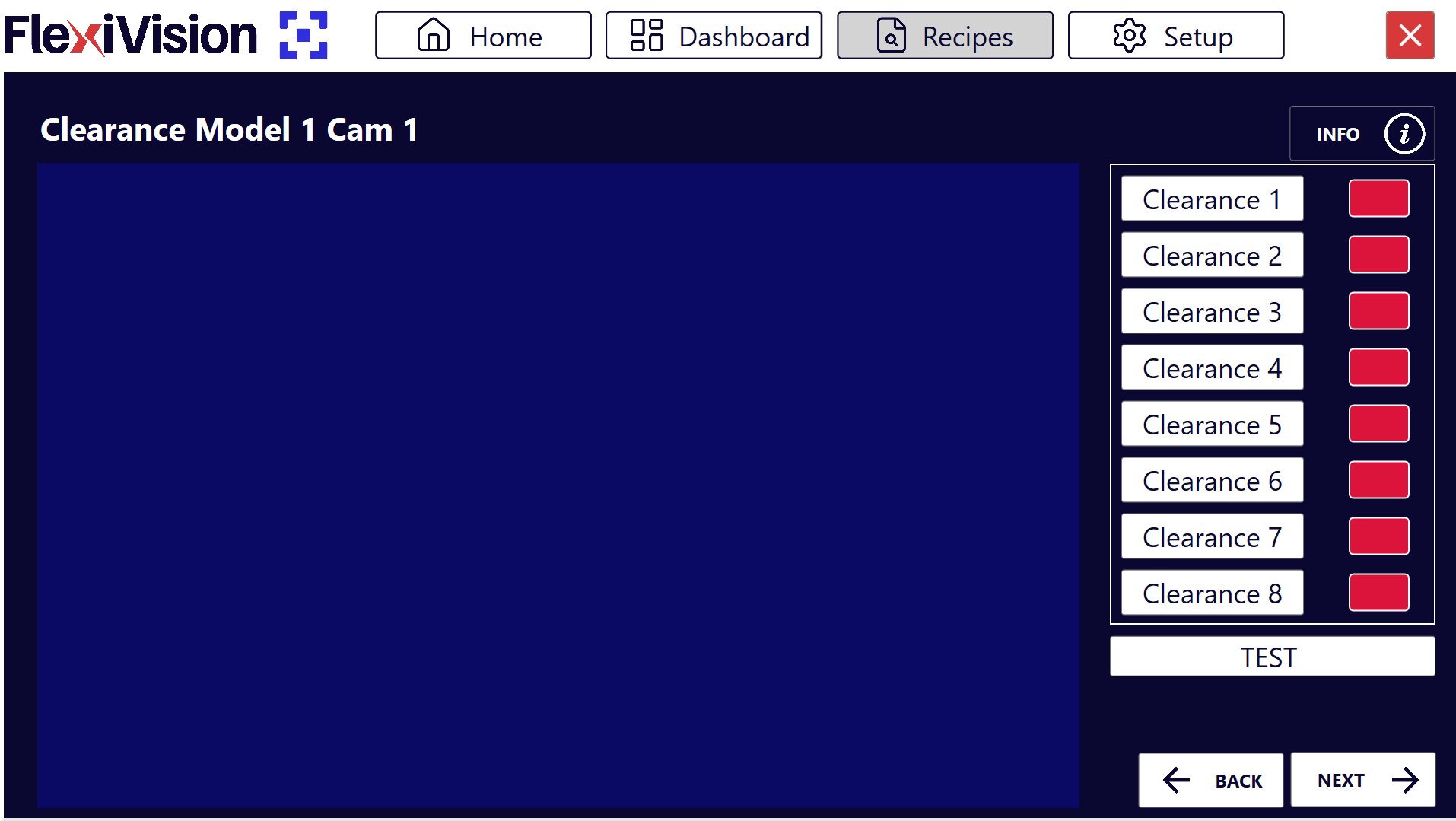
Sur la page Locator Model, après avoir cliqué sur Next, s’ouvre la liste des clearances disponibles (jusqu’à 8 par modèle). Page Clearances
|
||||||||||||
7 |
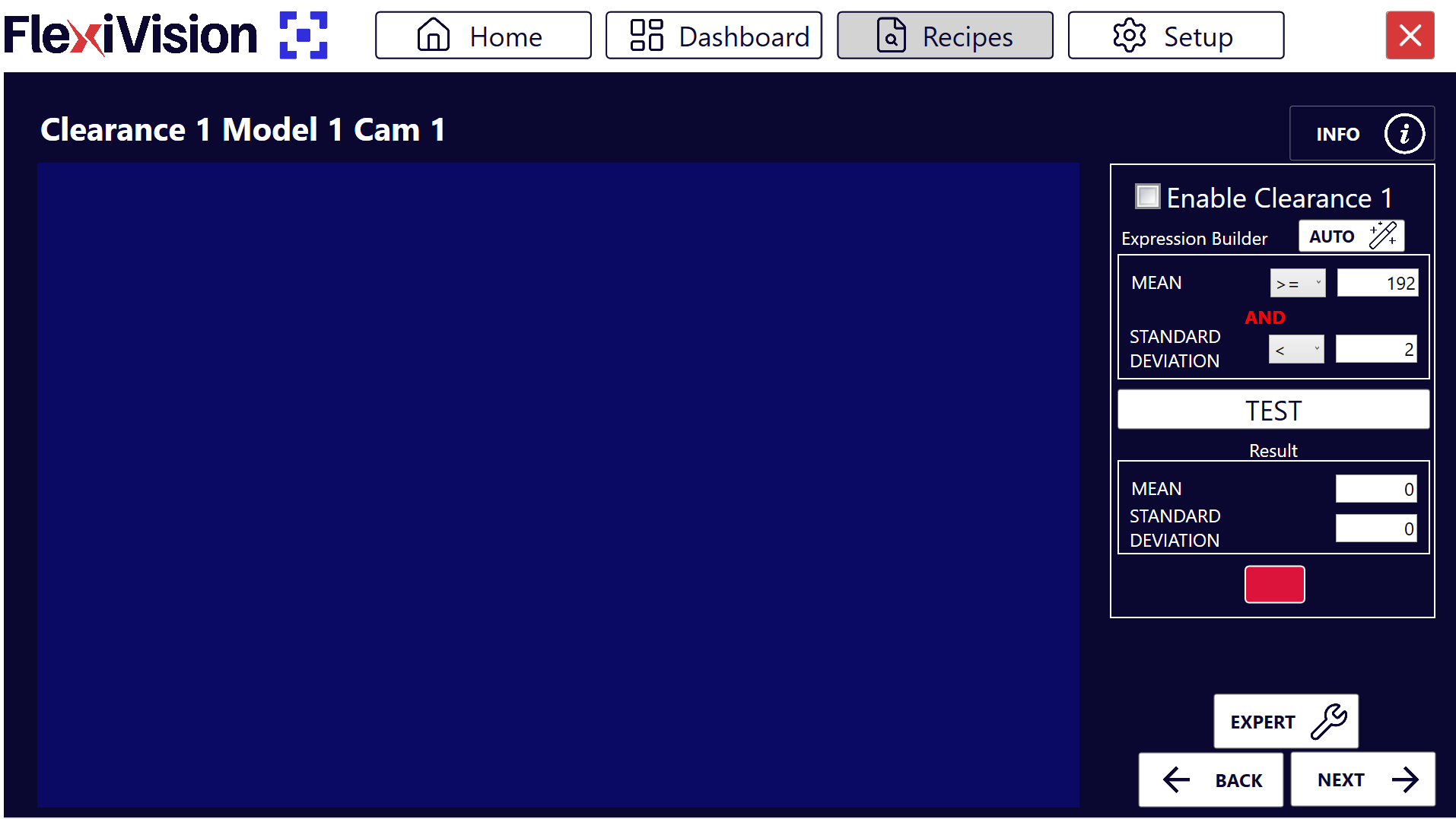
Cliquer sur Clearance 1, la page de configuration de la première clearance « Clearance 1 » s’ouvre. Page Clearance 1
|
Étape 3 : Activation et positionnement de zone#
8 |
Cliquer sur Enable Clearance pour activer la clearance |
9 |
Déplacer le cadre de la Clearance sur la zone qui doit rester dégagée
Important Toujours garder ces deux aspects importants à l’esprit :
Le non-respect de ces deux points peut entraîner des collisions avec le robot et endommager le FlexiBowl®, les composants ou le robot lui-même. |
Tip
En cas de doutes lors de la configuration, veuillez consulter le bouton INFO sur la page en cours.
Étape 4 : Configuration automatique#
10 |
Cliquer sur |
11 |
Cliquer sur |
12 |
Vérifier que l’encadré devient vert |
13 |
Cliquer sur |
 dans Expression Builder
dans Expression Builder

Warning
Que faire si le test échoue (encadré rouge) ?
Si, après AUTO, l’encadré devient rouge :
Causes possibles :
Il y a effectivement quelque chose dans la zone (pièce, ombre, saleté)
L’éclairage a changé entre la configuration AUTO et la configuration TEST
La zone sélectionnée comprend des bords du FlexiBowl® ou des artefacts
Solutions :
Vérifier visuellement que la zone est complètement libre
Répéter AUTO avec des conditions d’éclairage stables
Répéter TEST pour vérifier
Tip
En cas de doutes lors de la configuration, veuillez consulter le bouton INFO sur la page en cours.
Clearance Multiples - Quand les utiliser#
Il crée plus de clearances lorsque :
L’outil du robot est une pince : une clearance est nécessaire pour chacune des deux zones occupées par la pince de part et d’autre du composant de référence
Il y a plusieurs points critiques à surveiller
La zone de la pince a des géométries particulières
Étape 2-3 : Répétition#
Sélectionner une nouvelle clearance dans la page Liste des clearances, par exemple « Clearance 2 » et répéter les étapes 2-3. Répéter la procédure pour chaque clearance nécessaire (jusqu’à 8 par modèle).
Étape 4 : Test complet#
Sur la page de liste de toutes les clearances, cliquer sur TEST pour voir toutes les clearances en même temps
 #
#
Interprétation des états#
États des Clearances#
Couleur |
État |
Signification |
Image |
|---|---|---|---|
🟢 Vert |
OK |
Zone libre, prélèvement possible |
|
🔴 Rouge |
Triggered |
Zone occupée, prélèvement impossible |
|
Que signifie « Triggered » ?#
Une clearance devient rouge (triggered) lorsqu’elle détecte à l’intérieur :
Présence d’autres composants
Ombres ou reflets importants
Tout élément rendant la zone non libre
Étape 5 : Finalisation#
14 |
Après avoir configuré toutes les clearances nécessaires, cliquer sur |
15 |
La page Robot Model Pick Cam s’ouvre |
See also
Passer à l’Étalonnage du Robot pour terminer la configuration.