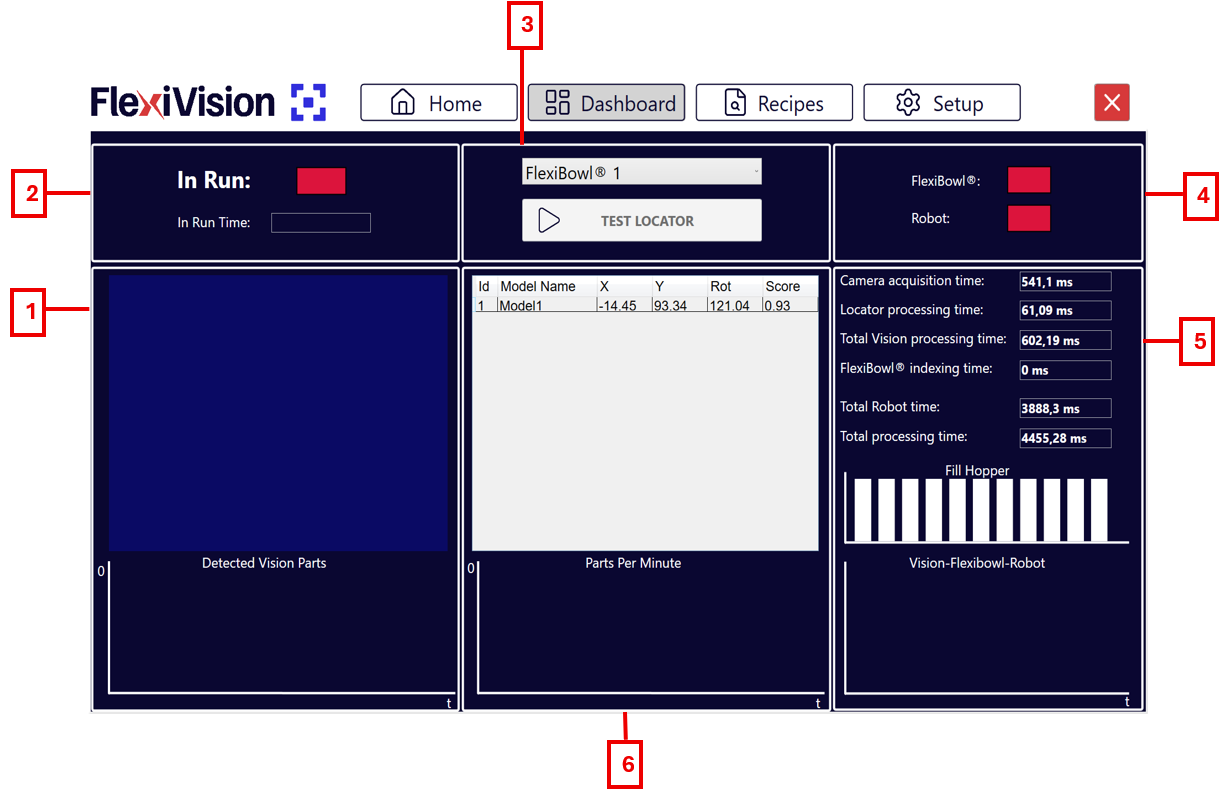
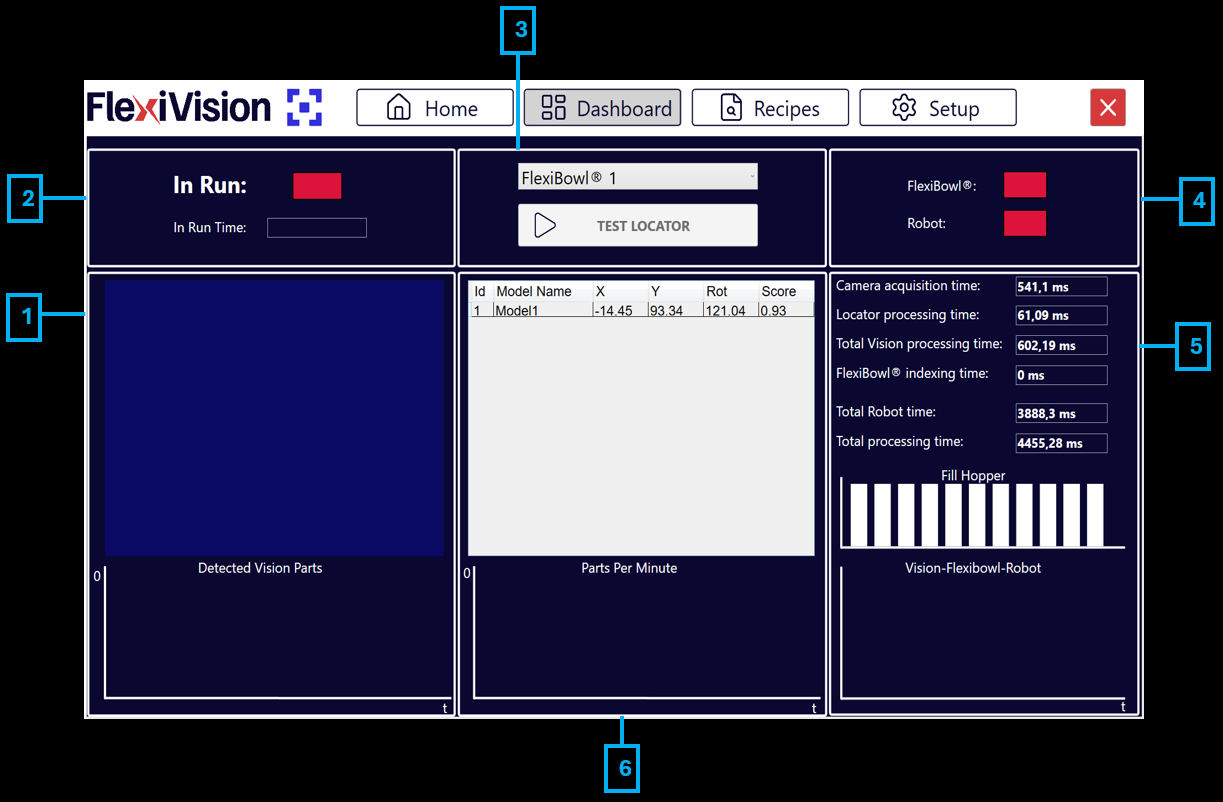
Pagina DashBoard#
# |
Descrizione |
|---|---|
1 |
Area Visione e Rilevamento
|
2 |
Stato Operativo
|
3 |
Controlli e Selezione
|
4 |
Stato Connessioni
|
5 |
Analisi Tempi di Ciclo (Timings)
|
6 |
Grafici di Performance e Storico
|
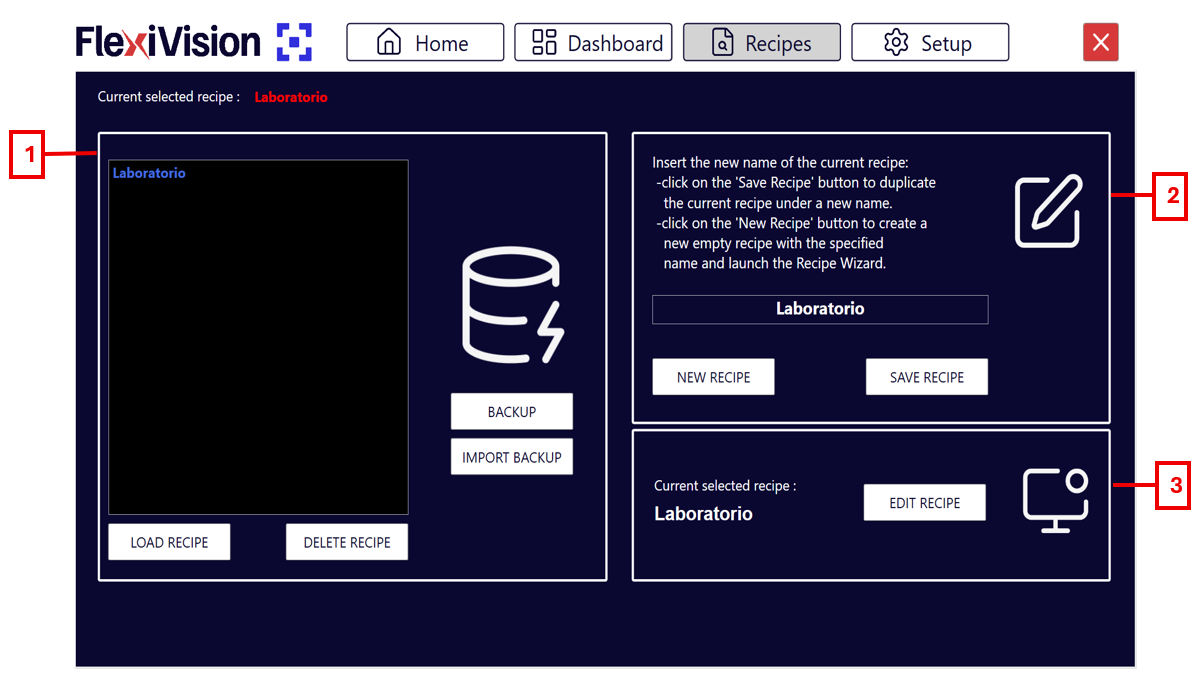
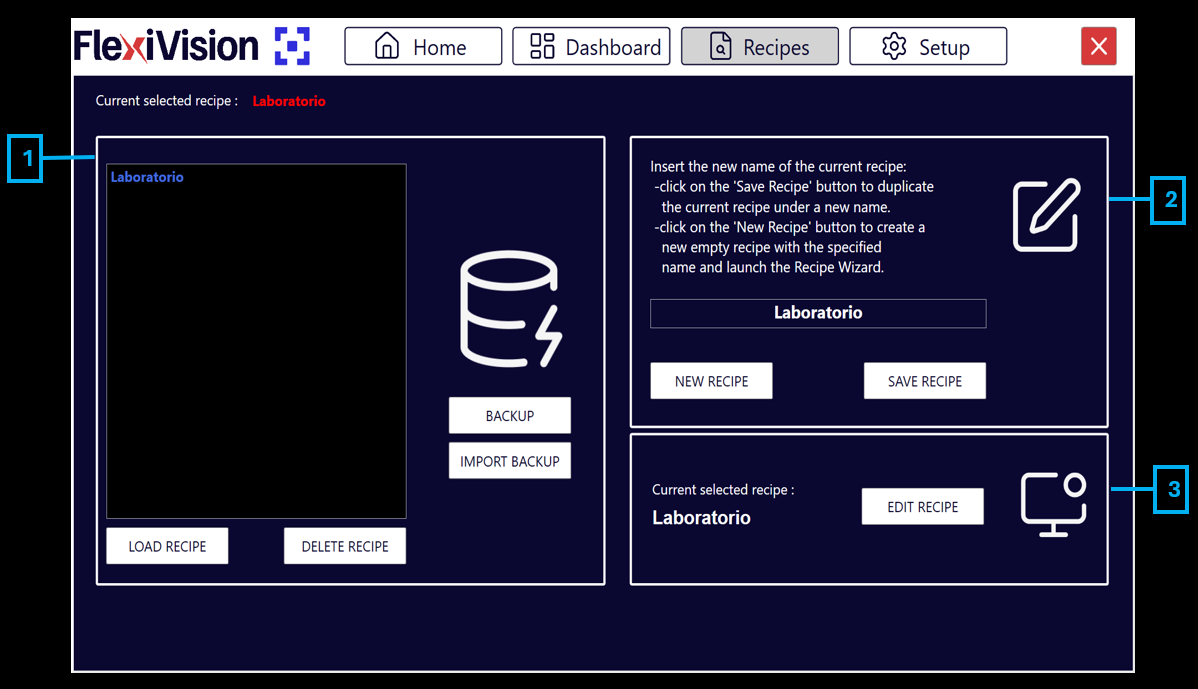
Pagina Recipes#
# |
Descrizione |
|---|---|
1 |
Gestione Database Ricette
|
2 |
Creazione e Salvataggio
|
3 |
Modifica Ricetta
|
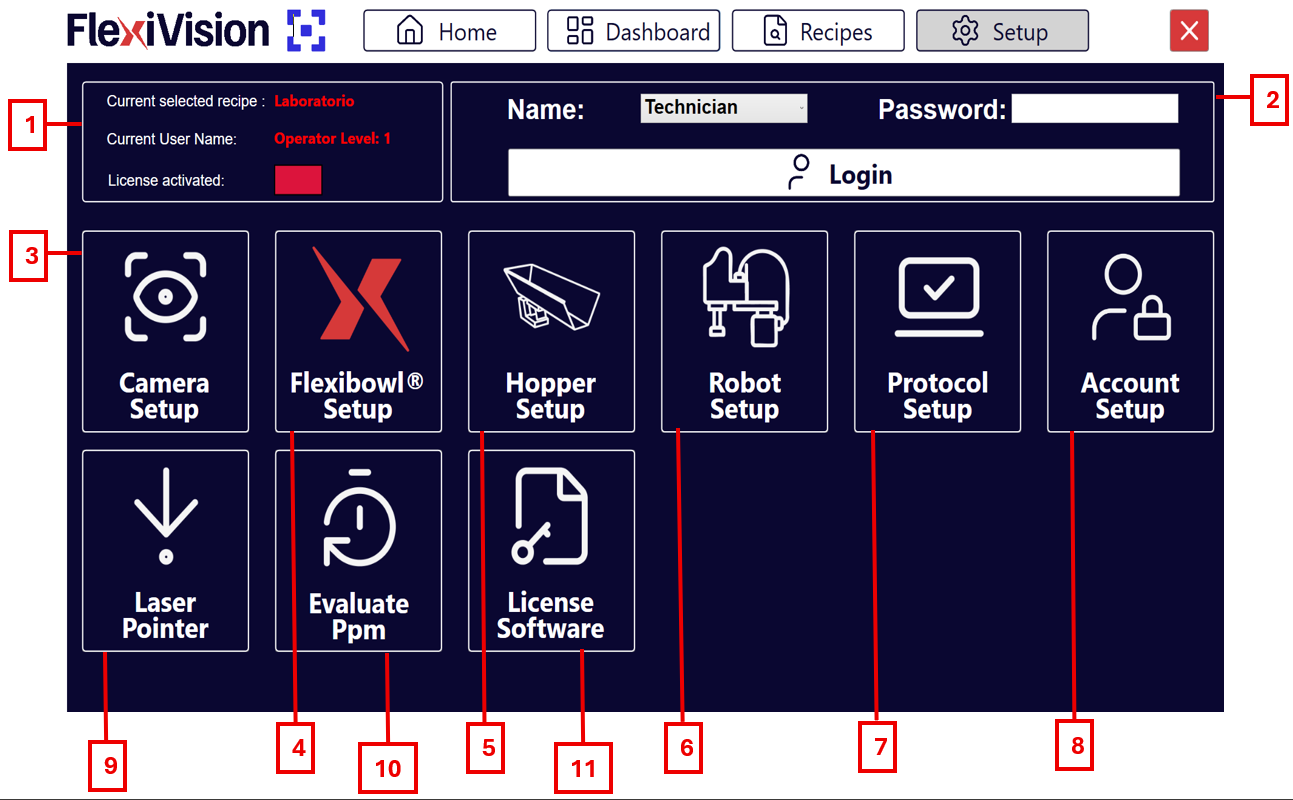
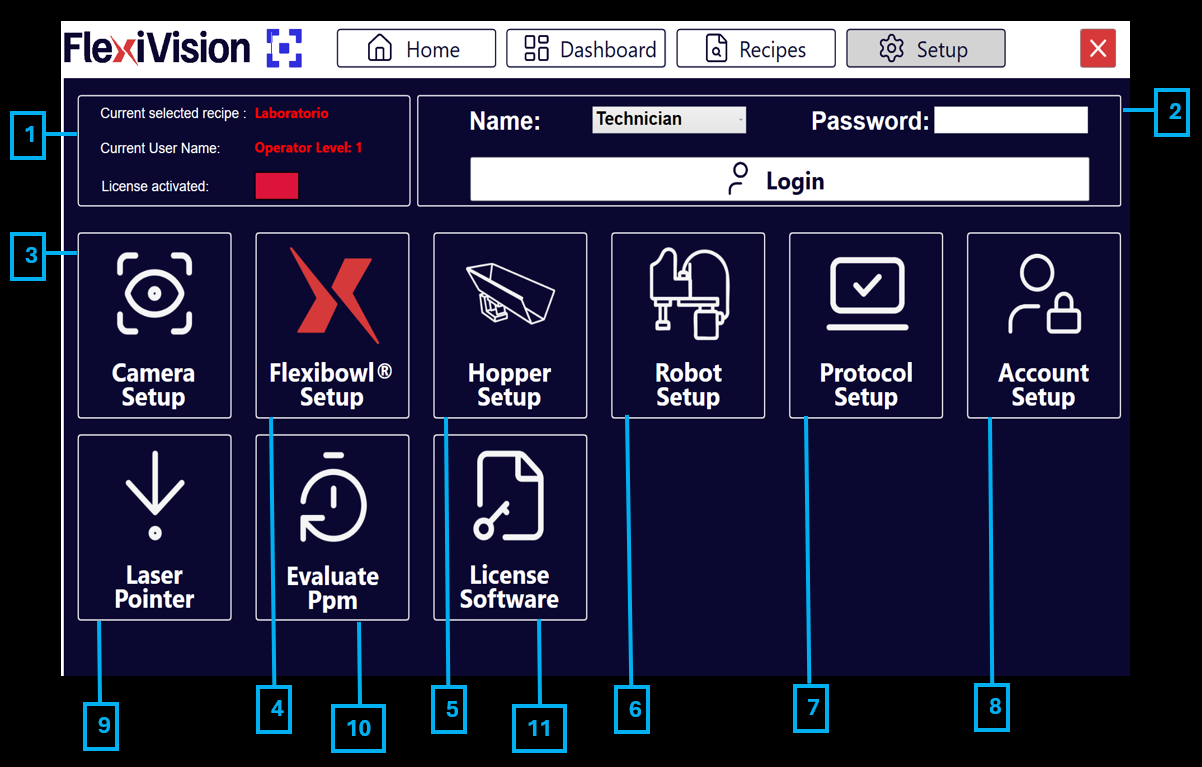
Pagina Setup#
# |
Descrizione |
|---|---|
1 |
Informazioni di Stato
|
2 |
Pannello di Accesso
|
3 |
Camera setup: sezione dedicata alla configurazione dei parametri delle telecamere. |
4 |
FlexiBowl® setup: area per impostare i parametri di movimento e controllo del FlexiBowl®. |
5 |
Hopper setup: configurazione dei parametri della tramoggia (vibrazione e scarico). |
6 |
Robot setup: sezione per la configurazione della comunicazione del robot. |
7 |
Protocol setup: pagina di configurazione dei parametri che definiscono quanti oggetti la visione deve o può restituire in ogni ciclo, con quale ordine vengono prioritizzati e quali valori statistici usare in base al numero di prese robot e al tempo massimo di gestione per ogni componente. |
8 |
Account setup: permette di configurare i vari account utente in base ai livelli di accesso. |
9 |
Laser pointer: permette di usare uno strumento laser per simulare un prelievo (pick) in assenza del robot. |
10 |
Evaluate PPM: permette di effettuare una stima dei pezzi al minuto (PPM) quando si utilizza il laser pointer. |
11 |
Licence software: pagina per l’attivazione della licenza software. |
i tasti INFO#
In ognuna delle sezioni operative, è disponibile un tasto INFO in alto a destra. All’interno di questo pulsante è disponibile la spiegazione della procedura Step By Step, la stessa procedura è visibile nel video tutorial.