Monitoraggio Applicazione: Dashboard#
La Dashboard è l’interfaccia principale per il monitoraggio in tempo reale del sistema FlexiVision One. In questa pagina è possibile verificare l’efficienza del processo, analizzare i tempi di ciclo, validare il riconoscimento dei componenti e identificare eventuali colli di bottiglia nel sistema.
Panoramica Interfaccia#
L’interfaccia della Dashboard si divide in quattro sezioni principali:
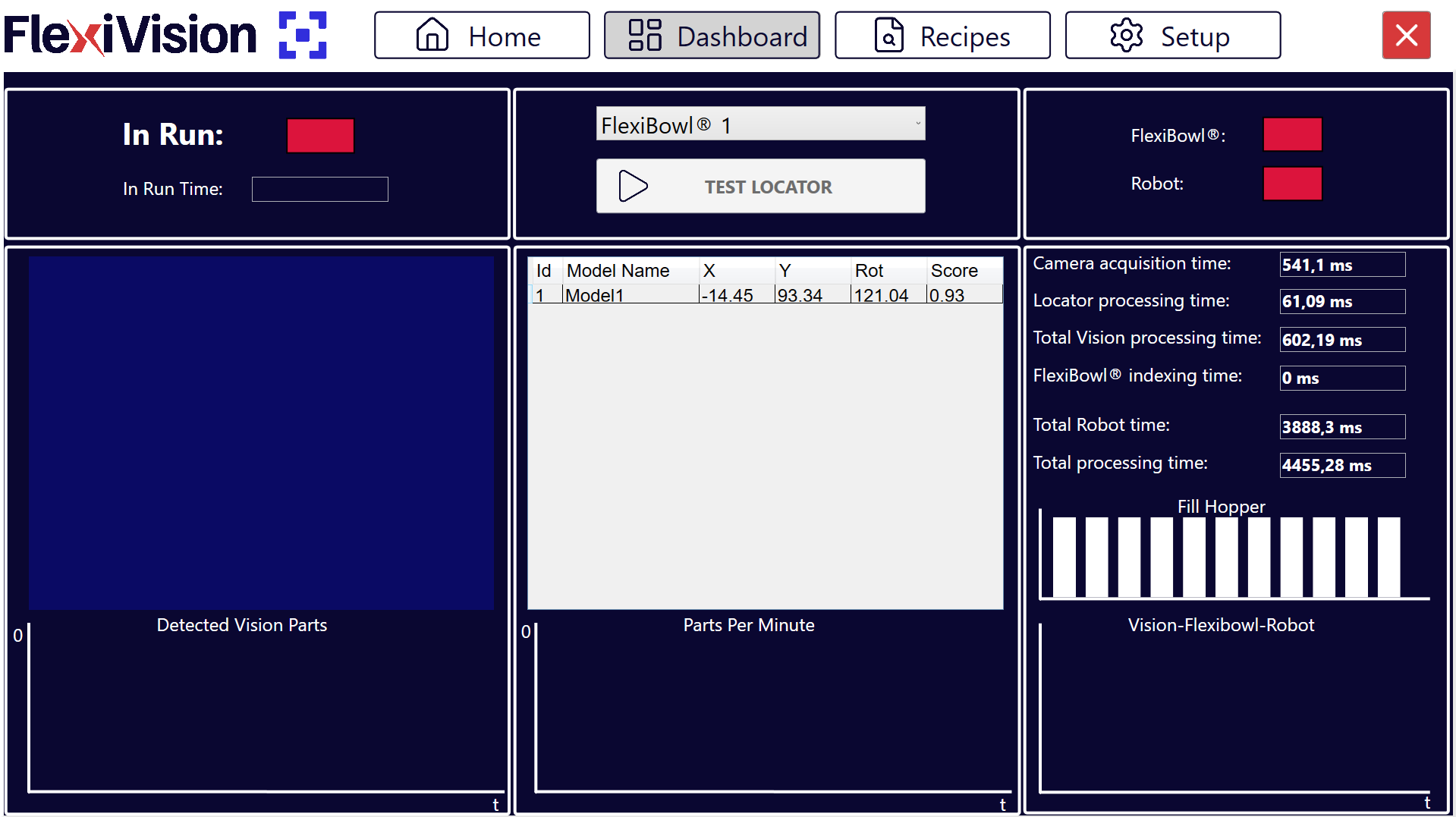
Controllo Operativo: Comandi e stato esecuzione
Analisi della Visione: Visualizzazione pezzi rilevati e dettagli
Indicatori Performance: Connettività e tempi ciclo
Analisi Grafica: Grafici storici produttività e tempi
Controllo Operativo - Comandi e stato esecuzione#
Elemento |
Descrizione e Funzione |
|---|---|
In Run |
Indicatore di stato che segnala se il sistema è attualmente in funzione. |
In Run Time |
Visualizza il tempo totale di attività del sistema dall’avvio dell’applicazione. |
Selezione FlexiBowl® |
Menu a tendina per selezionare il FlexiBowl® specifico da monitorare. |
Test Locator |
Scatta una foto dell’area di visione e avvia il riconoscimento dei componenti presenti. |
Tip
Test Locator Utile per:
Verificare che i componenti effettivamente vengano riconosciuti dalla visione
Nel caso in cui sia ha una collisione tra robot e comonente e voglio controllare l’affidabilità delle clearances
Analisi della Visione#
Al centro della dashboard vengono riportati i dati relativi ai componenti identificati dal sistema di visione.
Detected Vision Parts#
Detected Vision Parts mostra:
Immagine acquisita in tempo reale dalla camera
Un grafico storico dei rilevamenti negli ultimi 30 secondi che mostra l’andamento del numero di pezzi riconosciuti per acquisizione.
Tabella Modelli Rilevati#
Dettaglio componenti riconosciuti
La tabella sotto l’immagine elenca tutti i componenti presenti nell’area di pick con i seguenti parametri:
Campo |
Tipo Dato |
Descrizione |
|---|---|---|
Id |
Intero |
Identificativo univoco progressivo del componente (0, 1, 2, …). |
X |
Millimetri |
Coordinata X del componente. |
Y |
Millimetri |
Coordinata Y del componente. |
Rot (Rotation) |
Gradi |
Angolo di rotazione del componente. |
Score |
Percentuale |
Valore percentuale (0.00-1.00 o 0%-100%) che esprime il grado di affidabilità del riconoscimento. Rappresenta la vicinanza/fedeltà rispetto al modello di riferimento. Score più alto = corrispondenza migliore. |
Score > 0.90 (90%): |
|
Score 0.80-0.90 (80-90%): |
|
Score 0.70-0.80 (70-80%): |
|
Score < 0.70 (< 70%): |
|
Indicatori di Stato e Performance#
Connettività#
Indicatori di stato delle comunicazioni con i dispositivi esterni:
Indicatore |
Descrizione |
|---|---|
FlexiBowl® |
Stato della connessione hardware tra il VisionController (PC) e FlexiBowl®. |
Robot |
Stato della comunicazione con il robot. |
Warning
Azioni in caso di disconnessione
FlexiBowl® rosso:
Verificare cavo Ethernet FlexiBowl® → VisionController
Controllare alimentazione FlexiBowl®
Verificare IP FlexiBowl® in FlexiBowl® Setup
Tentare reconnect o riavvio software
Robot rosso:
Verificare cavo Ethernet Robot → VisionController
Controllare che robot abbia aperto connessione TCP/IP
Verificare porta TCP/IP in Robot Setup
Controllare programma robot (Indirizzo IP del VisionController e Porta inserita correttamente nella sezione robot setup )
In produzione, entrambi gli indicatori devono essere sempre verdi.
Analisi dei Tempi#
Il sistema fornisce un breakdown dettagliato dei tempi di ciclo per individuare eventuali colli di bottiglia e ottimizzare il processo.
Voce Temporale |
Descrizione |
|---|---|
Camera Processing Time |
Tempo impiegato per l’acquisizione dell’immagine dal sensore camera. Include tempo di esposizione e trasferimento dati. |
Locator Processing Time |
Tempo necessario all’algoritmo di visione per localizzare e riconoscere i componenti nell’immagine acquisita. Dipende da: numero modelli attivi, complessità modelli, numero clearances. |
Total Vision Processing |
Somma dei tempi di Camera e Locator. Rappresenta il tempo totale che il sistema di visione impiega per elaborare un’immagine e inviare la/le coordinate. |
Total FlexiBowl® Time |
Tempo impiegato dal FlexiBowl® per eseguire una sequenza di movimentazione completa. |
Total Robot Time |
Tempo stimato o rilevato per l’operazione di Pick & Place completa del robot. Include: avvicinamento → presa → sollevamento → deposito → ritorno. |
Total Processing Time |
Tempo totale del ciclo completo (Visione + FlexiBowl® + Robot). Rappresenta il tempo dall’inizio di un ciclo all’inizio del successivo. Determina la produttività massima teorica (PPM). |
Tip
Interpretazione tempi per ottimizzazione
Il grafico dei tempi permette di identificare il collo di bottiglia del sistema:
Se Total Vision Processing è il maggiore:
Troppi modelli attivi → Disabilitare modelli non necessari
Modelli troppo complessi → Semplificare con Score Threshold più alto
Troppi Clearances → Ridurre numero o dimensione clearances
Camera Processing alto → Ridurre tempo esposizione
Se Total FlexiBowl® Time è il maggiore:
Troppe pause → Ottimizzare sincronizzazione Flip/Move e ridurre la pausa di stabilizzazione (Pause X ms)
Sequenza movimentazione troppo lenta → Aumentare velocità in Config FlexiBowl®
Angolo rotazione eccessivo → Ridurre Move Angle
Shake troppo lungo → Aumentare velocità SHAKE e ridurre cicli SHAKE
Se Total Robot Time è il maggiore:
Traiettoria robot non ottimizzata → Ottimizzare path planning robot
Velocità robot troppo bassa → Aumentare velocità movimento (se sicuro)
Distanza deposito eccessiva → Riposizionare punto deposito più vicino
Tempi di presa troppo lunghi → Ottimizzare apertura/chiusura gripper
Obiettivo ottimizzazione: Bilanciare i tre tempi per ridurre Total Processing Time complessivo.
Analisi Grafica#
I grafici nella parte inferiore della dashboard permettono un’analisi predittiva e diagnostica delle performance del sistema nel tempo.
1. Parts Per Minute (PPM)#
Grafico produttività |
Mostra la produttività media del sistema espressa in componenti prelevati al minuto (Parts Per Minute). |
Caratteristiche: |
|
Utilizzo: |
|
Tip
PPM costante e stabile: |
✓ Sistema ben configurato |
PPM in diminuzione progressiva: |
⚠️ Possibile usura componenti (superficie grip FlexiBowl®) |
PPM con fluttuazioni ampie: |
⚠️ Instabilità nel processo |
Azioni correttive: |
|
2. Fill Hopper#
Grafico attivazioni tramoggia |
Rappresenta lo storico degli impulsi di scarico inviati alla tramoggia (Hopper). |
Caratteristiche: |
|
Utilizzo: |
|
Tip
Attivazioni regolari e costanti: |
✓ Configurazione Hopper ottimale |
Attivazioni sempre più frequenti: |
⚠️ Hopper si sta svuotando (meno pezzi = più attivazioni per mantenere livello) |
Nessuna attivazione per lungo periodo: |
⚠️ Robot fermo o rallentato (pezzi non vengono consumati) |
Attivazioni molto ravvicinate (burst): |
⚠️ Soglia Hopper mal configurata (troppo alta) |
3. Vision - FlexiBowl® - Robot (Grafico Comparativo)#
Grafico tempi sovrapposti |
Un grafico comparativo a tre linee che sovrappone i tempi dei singoli processi nel tempo. |
Utilizzo: |
Identificare istantaneamente quale processo influenza maggiormente il tempo di ciclo totale e come varia nel tempo. |
Monitoraggio Qualità - Indicatori critici da monitorare#
Score dei componenti |
Assicurarsi che lo Score dei componenti rilevati sia costantemente sopra la soglia di tolleranza (Accept Threshold) impostata durante la configurazione modello. |
Monitoraggio Score: |
|
Score in diminuzione progressiva: |
⚠️ Pezzi reali diversi da quello di training (variazioni produzione) |
Azioni correttive: |
|
Best Practices Monitoraggio Produttivo#
Check giornalieri#
All’avvio produzione (5 minuti): |
|
Durante produzione (check ogni 1-2 ore): |
|
A fine turno (2 minuti): |
|
Questa routine minima garantisce identificazione rapida di problemi e mantiene tracciabilità performance.
Report performance#
Tip
Metriche chiave da tracciare Per valutazione performance nel tempo, tracciare:
Giornalmente: |
|
Settimanalmente: |
|
Mensilmente: |
|
Questi dati permettono ottimizzazione continua e giustificano investimenti in miglioramenti.