2 FlexiBowl® e 2 Camere#
Questa sezione descrive le configurazioni disponibili quando si desidera operare con due FlexiBowl® e due camere gestiti da un unico VisionController FlexiVision One.
Panoramica della configurazione#
In una configurazione 2 FlexiBowl® + 2 Camere, il sistema comprende due stazioni di alimentazione e visione indipendenti, entrambe gestite dallo stesso VisionController. Ciascuna stazione è composta da:
1 FlexiBowl®
1 Camera con ottica dedicata
1 Tramoggia (opzionale, se presente)
Le due stazioni comunicano con il VisionController attraverso uno Switch di rete.
Important
Lo Switch è un componente obbligatorio in tutte le configurazioni multi-dispositivo. Senza di esso non è possibile collegare contemporaneamente più FlexiBowl® e più camere al VisionController. Per le specifiche tecniche e i codici d’ordine, consultare la sezione Switch.
Questa configurazione supporta due varianti operative, in base al numero di robot disponibili nell’impianto:
Variante A |
Variante B |
|
|---|---|---|
Robot |
1 |
2 |
FlexiBowl® |
2 |
2 |
Camere |
2 |
2 |
Logica operativa |
Il robot raggiunge entrambe le stazioni |
Ogni robot è dedicato a una stazione |
Switch richiesto |
Sì |
Sì |
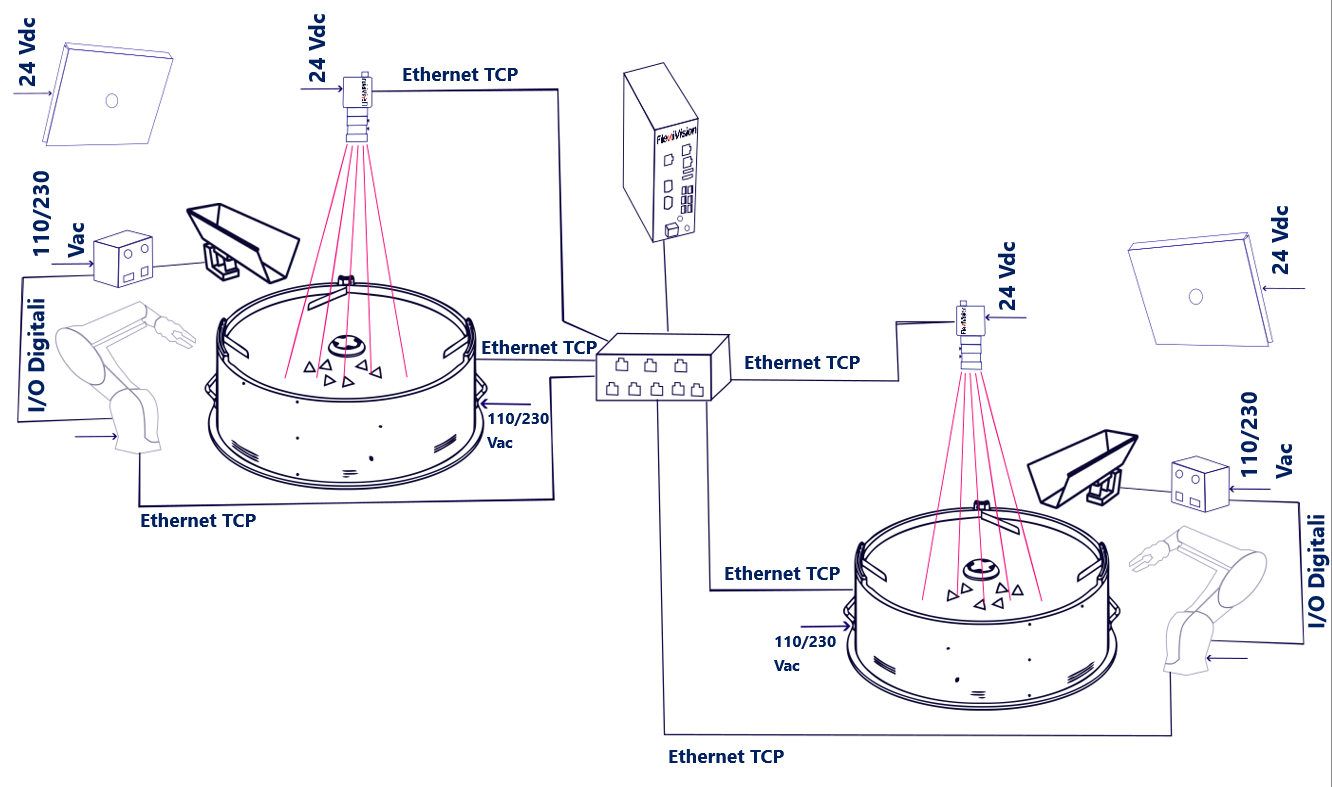
Variante A — 1 Robot, 2 FlexiBowl®#
In questa variante un singolo robot opera su entrambe le stazioni. Il robot è posizionato in modo da poter raggiungere l’area di picking di ciascun FlexiBowl®, alternando il prelievo tra le due stazioni sulla base dei comandi ricevuti.
Ogni stazione gestisce una propria ricetta indipendente. Su ciascuna stazione è possibile configurare un’applicazione di tipo Standard o Mix, con modelli di componenti diversi all’interno della stessa ricetta.
Parametro |
Valore |
|---|---|
FlexiBowl® |
2 |
Camere |
2 |
Robot |
1 |
Switch richiesto |
Sì |
Important
Ricetta base e gestione delle ricette
Come per la configurazione singola, anche in una configurazione 2FB + 2CAM il processo parte dalla creazione di un’unica ricetta base, che contiene i setup hardware e la calibrazione della camera per l’intero sistema. Questa ricetta base viene poi duplicata per ciascuna stazione: ogni duplicato costituisce la ricetta operativa di quella stazione, all’interno della quale vengono creati i modelli dei pezzi (fino a 8 per stazione).
Per questo è fondamentale che l’associazione tra i dispositivi venga configurata correttamente fin dall’inizio:
Camera 1 → FlexiBowl® 1 (+ Tramoggia 1, se presente)
Camera 2 → FlexiBowl® 2 (+ Tramoggia 2, se presente)
Un’associazione errata in fase di setup si ripercuoterebbe su tutte le ricette derivate, compromettendo il riconoscimento dei pezzi e il corretto funzionamento dell’intero sistema.
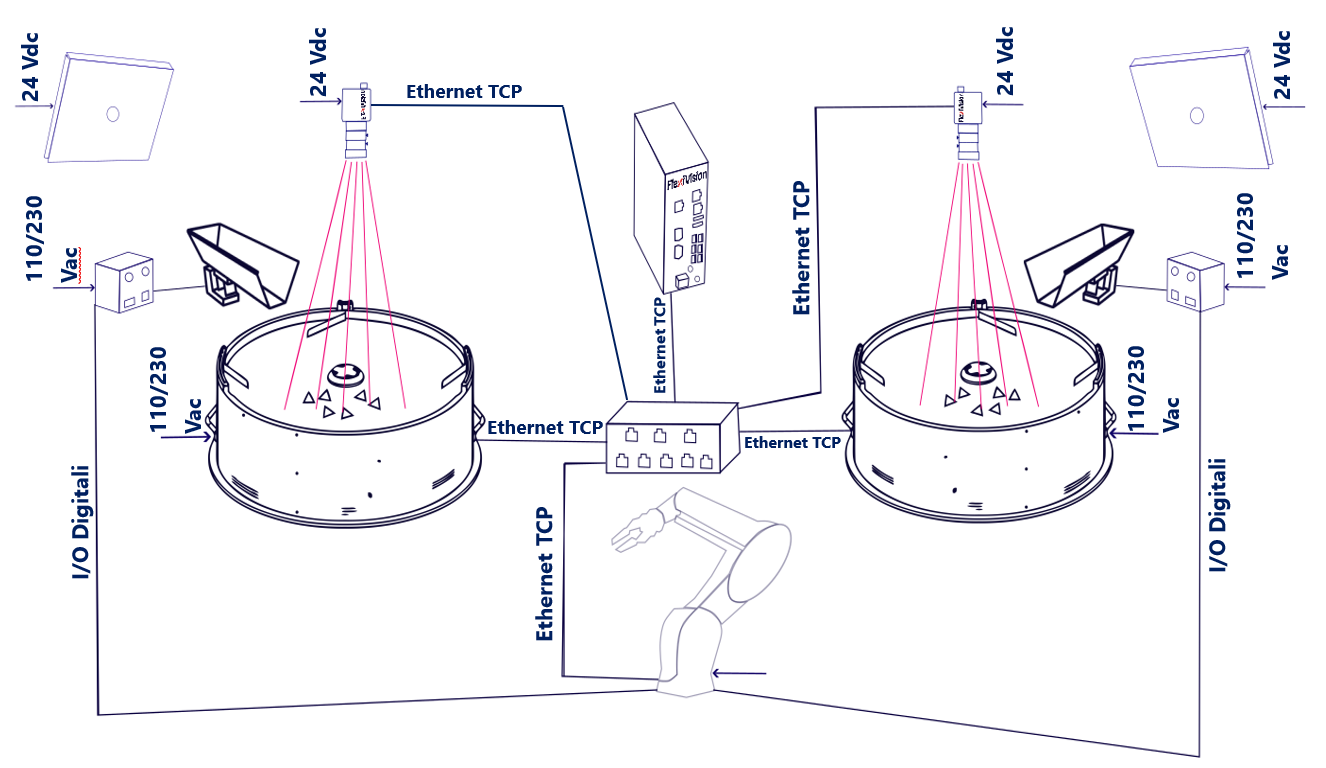
Variante B — 2 Robot, 2 FlexiBowl®#
In questa variante ogni robot è dedicato a una singola stazione: il Robot 1 effettua il picking sul FlexiBowl® 1, il Robot 2 effettua il picking sul FlexiBowl® 2. Le due celle sono indipendenti e non si sovrappongono.
Anche in questa variante ciascuna stazione supporta applicazioni sia di tipo Standard che Mix.
Parametro |
Valore |
|---|---|
FlexiBowl® |
2 |
Camere |
2 |
Robot |
2 |
Switch richiesto |
Sì |
Tip
Questa variante garantisce la massima produttività, con le due celle che operano in parallelo e in modo completamente autonomo.
Important
Ricetta base e gestione delle ricette
Come per la configurazione singola, anche in una configurazione 2FB + 2CAM il processo parte dalla creazione di un’unica ricetta base, che contiene i setup hardware e la calibrazione della camera per l’intero sistema. Questa ricetta base viene poi duplicata per ciascuna stazione: ogni duplicato costituisce la ricetta operativa di quella stazione, all’interno della quale vengono creati i modelli dei pezzi (fino a 8 per stazione).
Per questo è fondamentale che l’associazione tra i dispositivi venga configurata correttamente fin dall’inizio:
Camera 1 → FlexiBowl® 1 (+ Tramoggia 1, se presente)
Camera 2 → FlexiBowl® 2 (+ Tramoggia 2, se presente)
Un’associazione errata in fase di setup si ripercuoterebbe su tutte le ricette derivate, compromettendo il riconoscimento dei pezzi e il corretto funzionamento dell’intero sistema.
Componenti necessari#
Kit base FlexiVision One#
Il kit base FlexiVision One (fornito con il sistema) include già tutto il necessario per la prima stazione (camera, ottica, cavi, griglia di calibrazione). Non è necessario acquistare un secondo kit completo per la seconda stazione.
Kit Camera Aggiuntiva#
Per la seconda stazione è sufficiente acquistare il Kit Camera Aggiuntiva, disponibile in una versione specifica per ogni taglia di FlexiBowl®. Il kit include:
1 Camera
1 Ottica dedicata alla taglia FlexiBowl®
1 Griglia di calibrazione
1 Cavo alimentazione camera
2 Cavi Ethernet
Selezionare il kit in base alla taglia del secondo FlexiBowl®:
Taglia FlexiBowl® |
Codice Kit Camera Aggiuntiva |
Ottica inclusa |
|---|---|---|
FB 200 |
GM002002 |
CE000881 — FlexiVision One 35mm Optic |
FB 350 |
GM002003 |
CE000881 — FlexiVision One 35mm Optic |
FB 500 |
GM002004 |
CE000880 — FlexiVision One 25mm Optic |
FB 650 |
GM002005 |
CE000879 — FlexiVision One 16mm Optic |
FB 800 |
GM002006 |
CE000879 — FlexiVision One 16mm Optic |
FB 1200 |
GM002007 |
CE000878 — FlexiVision One 12mm Optic |
Note
Se le due stazioni utilizzano FlexiBowl® di taglie diverse, il Kit Camera Aggiuntiva deve essere selezionato in base alla taglia del FlexiBowl® della seconda stazione. La prima stazione è già coperta dal kit base.
Switch#
Lo Switch è sempre necessario nelle configurazioni multi-dispositivo. Per codice, specifiche elettriche e fisiche consultare la sezione dedicata:
→ Switch
Cablaggio#
Lo schema di cablaggio è identico per entrambe le varianti: tutti i dispositivi di campo (FlexiBowl®, camere, robot) si collegano allo Switch, e lo Switch si collega al VisionController tramite una singola porta Ethernet. La differenza tra Variante A e Variante B riguarda esclusivamente il numero di robot connessi allo Switch.
Important
Lo Switch dispone di 8 porte Ethernet. Verificare che il numero totale di dispositivi da collegare non superi la capacità disponibile, tenendo conto di tutti i FlexiBowl®, camere e robot presenti.
Schema di connessione#
Dispositivo |
Collegamento |
|---|---|
FlexiBowl® 1 |
Porta Ethernet → Switch |
FlexiBowl® 2 |
Porta Ethernet → Switch |
Camera 1 |
Cavo Ethernet → Switch |
Camera 2 |
Cavo Ethernet → Switch |
Robot 1 |
Porta Ethernet → Switch |
Robot 2 (solo Variante B) |
Porta Ethernet → Switch |
Switch |
Porta Ethernet → VisionController |
Tip
Verificare che a ciascun dispositivo sia assegnato un indirizzo IP univoco nella stessa subnet. Le porte TCP/IP utilizzate dal VisionController per le due stazioni sono configurabili: per default FB1 → 4001, FB2 → 4002. Consultare la sezione Protocollo Comunicazione Robot-Visione per i dettagli.
Porte Switch occupate per variante#
Porta Switch |
Variante A (1 Robot) |
Variante B (2 Robot) |
|---|---|---|
1 |
FlexiBowl® 1 |
FlexiBowl® 1 |
2 |
FlexiBowl® 2 |
FlexiBowl® 2 |
3 |
Camera 1 |
Camera 1 |
4 |
Camera 2 |
Camera 2 |
5 |
Robot 1 |
Robot 1 |
6 |
VisionController |
Robot 2 |
7 |
— |
VisionController |
8 |
— |
— |
Note
Cablaggio dei singoli componenti
Le procedure di collegamento fisico di ciascun componente (FlexiBowl®, camera, tramoggia, robot) sono descritte integralmente nella sezione Cablaggio e Connessioni. In una configurazione 2FB + 2CAM le stesse operazioni vanno semplicemente eseguite due volte — una per ciascuna stazione — con l’unica differenza che ogni dispositivo si collega allo Switch anziché direttamente al VisionController.
Important
Associazione dispositivi nel software
FlexiVision One è in grado di gestire contemporaneamente tutte le stazioni, ma è fondamentale che l’associazione tra i dispositivi venga configurata correttamente nel software. Assicurarsi di associare:
Camera 1 → FlexiBowl® 1 (+ Tramoggia 1, se presente)
Camera 2 → FlexiBowl® 2 (+ Tramoggia 2, se presente)
Un’associazione errata comprometterebbe la localizzazione dei pezzi e il corretto funzionamento dell’intero sistema.
→ Configurazione Iniziale del Sistema